STM32F4微控制器中文手册概述与实践指南
微控制器是嵌入式系统的心脏,其中STM32F4系列以其高性能和丰富的功能受到开发者的青睐。本章节将概述STM32F4系列微控制器的特性,为深入探讨其架构和应用奠定基础。STM32F4系列微控制器由STMicroelectronics推出,基于ARM Cortex-M4内核,提供了一系列的性能改进,如更高的CPU频率,以及更多的外设和存储选项。该系列设备的设计旨在满足工业控制、医疗设备、消费电子等领

简介:STM32F4系列微控制器具备高性能和低功耗特点,适用于多领域。该手册为初学者和有经验的开发者提供了全面的技术指导,包括处理器架构、内存配置、外设接口、存储器、嵌入式安全特性、开发工具、应用示例、电气特性、故障诊断等内容。初学者可通过本手册系统地学习STM32F4的基础知识,进阶用户可通过手册中的详细技术参数和应用指南优化设计和程序。建议进阶用户也参考英文资料以掌握最新技术。 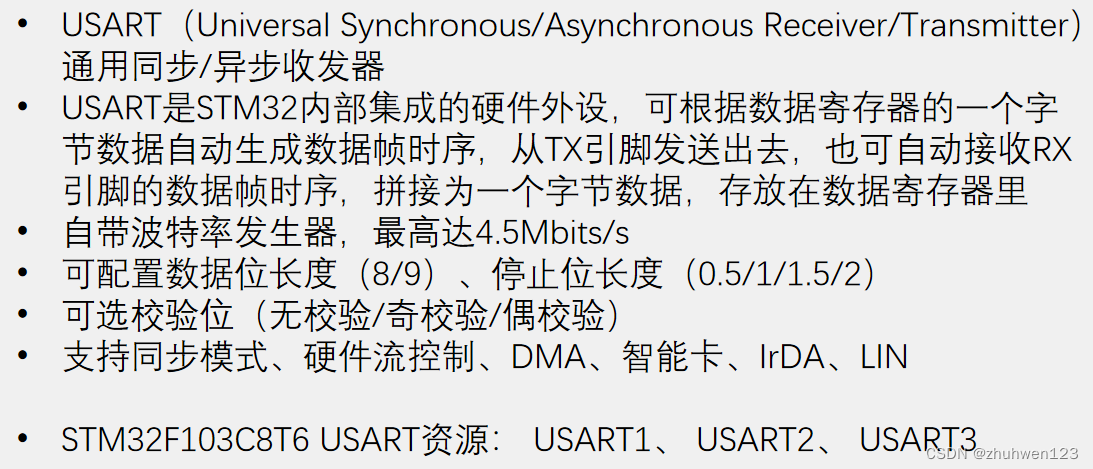
1. STM32F4系列微控制器特性概述
微控制器是嵌入式系统的心脏,其中STM32F4系列以其高性能和丰富的功能受到开发者的青睐。本章节将概述STM32F4系列微控制器的特性,为深入探讨其架构和应用奠定基础。
1.1 STM32F4系列简介
STM32F4系列微控制器由STMicroelectronics推出,基于ARM Cortex-M4内核,提供了一系列的性能改进,如更高的CPU频率,以及更多的外设和存储选项。该系列设备的设计旨在满足工业控制、医疗设备、消费电子等领域的需求。
1.2 核心优势分析
- 性能 :最大180 MHz的运行频率,配备单周期乘法器和浮点单元(FPU),支持DSP指令,为复杂算法的执行提供了强大的计算能力。
- 能效 :多种低功耗模式,支持动态电压调整,使得设备在不牺牲性能的情况下,可以更加节能环保。
- 集成度 :集成了丰富的外设接口,如USB OTG、CAN、SDIO等,减少了外部组件的需求,简化了设计。
1.3 应用领域展望
STM32F4系列微控制器的多样性和灵活性使其成为各种应用领域的理想选择。例如,在物联网(IoT)设备中,STM32F4能够处理大量数据并实现复杂的网络通信协议。在嵌入式图像处理方面,其高性能处理器可以应对高清视频流的实时分析。
接下来的章节将进一步分析STM32F4系列微控制器的内核架构、存储管理、外设接口,以及如何在不同应用场景中利用其强大的功能和特性。
2. ARM Cortex-M4内核及其外设功能介绍
2.1 ARM Cortex-M4内核架构分析
2.1.1 内核的基本特性
ARM Cortex-M4内核是ARM公司为中高端嵌入式系统设计的一款处理器,它不仅继承了Cortex-M系列的低功耗和实时性特点,还具备了数字信号处理(DSP)功能。M4内核采用32位RISC架构,支持单周期乘法和乘累加操作,提供高性能的信号处理能力。该内核主要针对需要复杂控制和数据处理能力的嵌入式应用,如工业控制、汽车电子、医疗设备、物联网等。
M4内核具备以下基本特性:
- 三级流水线,可以达到更高的指令执行效率;
- 可配置的中断优先级,提供灵活的实时响应;
- 支持Thumb-2指令集,既能保持代码密度,又能提供较高的执行速度;
- 内部集成的嵌入式跟踪宏单元(ETM),便于开发者进行调试和分析。
2.1.2 处理器模式和异常处理
Cortex-M4内核支持几种不同的处理器模式,主要包括线程模式(Thread mode)和处理模式(Handler mode)。线程模式用于运行应用程序代码,处理模式则是用于处理异常情况,比如中断和系统异常。
异常处理机制是Cortex-M4内核的重要组成部分,它包括同步异常和异步异常。同步异常是指由于执行指令导致的异常,例如指令预取中止;异步异常是指外部事件触发的中断。异常处理流程包括异常的识别、向量定位、中断服务程序的执行和异常返回等步骤。Cortex-M4内核中,所有的异常都有一个固定的异常号和对应的异常向量表,保证了高效的异常处理。
2.2 Cortex-M4内核高级特性
2.2.1 单周期乘法器和DSP指令集
ARM Cortex-M4内核内置了单周期乘法器,该乘法器能够在一个时钟周期内完成32位数的乘法操作,对于信号处理等需要频繁乘法运算的应用场景而言,极大地提升了性能。此外,Cortex-M4还支持DSP指令集,这些指令可以实现更复杂的数学运算,比如乘加、乘减、饱和累加等,使得内核在处理信号处理任务时更加高效。
以下是DSP指令集的一个例子,展示了如何使用 SSAT 指令实现饱和算术:
SSAT Rd, #n, Rm ; Rd = Rm saturation to n bits
这条指令将寄存器 Rm 中的值截取到最右边的n位,并且如果发生了溢出,则将结果设置为n位能表示的最大正数或最小负数。
2.2.2 带FPU的浮点运算能力
Cortex-M4内核集成了浮点单元(FPU),支持单精度浮点运算,并遵循IEEE 754标准。这使得内核能够处理科学计算、图形处理和其他需要浮点运算的应用。FPU的集成允许开发者直接在硬件级别上执行浮点计算,无需软件仿真,从而提升了性能和精度。
2.3 核心外设功能详解
2.3.1 定时器和计数器
Cortex-M4内核提供了多个定时器和计数器,包括基本定时器、通用定时器和高级控制定时器。这些定时器可用于生成精确的时序控制,例如PWM信号生成、输入捕获、输出比较、定时和计数功能。特别是高级控制定时器,它提供了与电机控制相关的PWM输出,具备死区控制等特性,非常适用于电机驱动和逆变器应用。
下面是一个基本的定时器初始化代码段,展示了如何设置一个基本定时器:
void TIM2_Init(void) {
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
// 1. Enable TIM2 clock
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
// 2. Fill TIM2 initialization structure with default parameters
TIM_TimeBaseStructInit(&TIM_TimeBaseStructure);
// 3. Set timer period
TIM_TimeBaseStructure.TIM_Period = 0xFFFF;
// 4. Set clock division
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
// 5. Initialize TIM2
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
// 6. Configure and enable TIM2 interrupt
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
// 7. Enable TIM2
TIM_Cmd(TIM2, ENABLE);
}
该代码段首先使能了定时器2的时钟,然后使用默认的初始化结构体配置了定时器参数,接着设置了定时器周期、时钟分频,并初始化了中断。最后启动定时器,并使能了相应的中断。
2.3.2 串行通信接口(USART、SPI、I2C)
Cortex-M4内核支持多种串行通信接口,包括通用同步/异步收发传输器(USART)、串行外设接口(SPI)和两线串行总线(I2C)。这些接口极大地丰富了微控制器的通信能力,可以连接各种外围设备,如传感器、显示器、存储器等。USART支持全双工通信,SPI支持主从通信,而I2C支持多主机通信。开发者可以根据实际应用场景选择合适的通信接口。
这里提供一个简单的I2C初始化代码示例,展示了如何设置I2C的基本参数:
void I2C1_Init(void) {
I2C_InitTypeDef I2C_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
// 1. Enable clock for I2C1 and AFIO
RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
// 2. Configure I2C pins: SCL and SDA
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_Init(GPIOB, &GPIO_InitStructure);
// 3. Fill I2C initialization structure
I2C_InitStructure.I2C_Mode = I2C_Mode_I2C;
I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2;
I2C_InitStructure.I2C_OwnAddress1 = 0x30;
I2C_InitStructure.I2C_Ack = I2C_Ack_Enable;
I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
I2C_InitStructure.I2C_ClockSpeed = 100000;
// 4. Initialize I2C
I2C_Init(I2C1, &I2C_InitStructure);
// 5. Enable I2C
I2C_Cmd(I2C1, ENABLE);
}
该代码首先启用了I2C1接口和相关的GPIO时钟,然后配置了I2C的SCL和SDA引脚作为开漏输出。之后,代码填充了I2C初始化结构体,设置了I2C为I2C模式,2分频的时钟,7位设备地址等参数,并完成了I2C的初始化配置。最后,启动了I2C模块。通过这些步骤,STM32F4微控制器就可以作为I2C总线上的一个主设备或从设备进行通信。
3. 存储器配置和访问方法
3.1 存储器映射和类型
3.1.1 内存区域和访问权限
STM32F4系列微控制器的存储器映射基于一个统一的4GB地址空间,其中包含了多个内存区域。从地址0x0000_0000到0x1FFF_FFFF被分配给内嵌的闪存存储器(Flash),通常用来存储程序代码和一些非易失性数据。从0x2000_0000到0xDFFF_FFFF的地址范围是SRAM区域,这部分是为运行时数据存储所保留的。外设寄存器占据了地址范围从0xE000_0000到0xFFFF_FFFF的内存区域。这样的内存布局为处理器提供了清晰的访问途径,也方便了内存保护和隔离。
访问权限的概念对于存储器映射至关重要。内存区域可以有不同的访问权限设置,例如,有些区域可能是只读的,有些区域则可读写。例如,内部Flash存储器通常被设置为只读,以防止程序运行时意外修改代码。而SRAM区域则需要可读写权限以存储运行时数据。外设寄存器区域的每个寄存器地址都有严格的权限定义,防止不当的访问导致设备异常。
3.1.2 系统配置控制
系统的配置控制通常在启动阶段进行,通过设置不同的寄存器来完成。例如,存储器控制寄存器(如FLASH_ACR)配置存储器访问速度、预取缓冲器和等待状态等。这些设置对于确保程序和数据可以以最优的方式被访问至关重要,尤其是当系统运行频率较高或需要高效处理外设数据时。
为了修改这些配置,开发者通常需要直接操作特定的系统控制寄存器。修改这些寄存器之前,了解它们的位定义和修改策略是十分必要的,因为错误的配置可能导致系统不稳定或功能失效。通常,设备的数据手册和参考手册会提供这些细节。
3.2 存储器管理单元(MMU)和缓存
3.2.1 MMU的功能和配置
存储器管理单元(MMU)是ARM架构中的一个重要组件,尽管STM32F4系列微控制器内部并没有传统的MMU,因为它设计用于实时嵌入式应用,不需要复杂的操作系统支持。但是,理解MMU的功能对于学习更高级的ARM架构微控制器是十分有益的。
MMU的主要功能是实现虚拟内存管理,它通过将虚拟地址映射到物理地址来实现内存保护、内存共享和内存访问权限控制等。这对于需要运行多任务或多进程的复杂操作系统来说非常关键。在没有MMU的STM32F4中,开发者通常通过其他方式实现内存隔离和保护,例如使用软件库函数来模拟虚拟内存管理。
3.2.2 缓存的实现和优化
尽管STM32F4系列微控制器没有MMU,但它确实具有一个数据和指令缓存。这个缓存利用了CPU和较慢的主存储器之间的速度差异,提高了性能。缓存对于提高内存访问速度尤其重要,尤其是在访问频繁且速度要求高的场景中。
缓存的优化通常涉及以下方面:
- 缓存大小的调整:在应用程序中,可以通过配置缓存大小来优化性能和功耗。
- 缓存策略的管理:决定哪些数据可以被缓存以及如何替换缓存中的数据。
- 缓存一致性:确保缓存中的数据与主存储器中的数据同步。
开发者可以通过配置微控制器的系统控制块(System Control Block,SCB)中的一些寄存器来调整缓存大小和策略。例如,通过修改CACR寄存器可以改变指令缓存的配置,从而优化代码执行效率。
3.3 外部存储器接口(EMI)使用
3.3.1 支持的存储器类型
STM32F4系列微控制器提供了丰富的外部存储器接口,以支持不同类型外部存储器的连接和操作。这些外部存储器可能包括NOR闪存、PSRAM、SRAM、SDRAM和NAND闪存等。通过EMI,开发者可以将这些存储器连接到微控制器上,并利用它们来扩展内部资源,如程序代码存储或数据存储。
不同的存储器类型有其特定的接口参数和操作要求,比如时序要求、读写操作等。为了正确配置EMI,开发者必须参照外部存储器的数据手册,确保所有的时序要求和电气要求得到满足。
3.3.2 接口配置和性能优化
EMI配置通常在微控制器启动时进行设置,包括诸如数据宽度、时序参数、读写等待周期等关键参数。为了提高外部存储器的性能,合理的配置这些参数至关重要。这涉及了理解EMI控制器的不同模式和如何根据所连接的外部存储器类型来优化参数。
例如,SDRAM控制器需要设置正确的时序参数,如tRFC、tRCD、tRP、tRAS等,这些参数决定了数据读写的效率和稳定性。对这些参数的调整需要开发者仔细阅读外部存储器的数据手册,并通过实验来找到最佳的配置。
以下是一个简化的代码示例,展示了如何初始化外部存储器接口(以NAND闪存为例):
// 假设EMI_BASE是外部存储器接口的基地址
#define EMI_BASE (0x60000000)
// EMI初始化结构体
typedef struct {
uint32_t EMICR; // 控制寄存器
uint32_t EMI_BCR; // NAND闪存控制寄存器
uint32_t EMI_BTR; // NAND闪存时序寄存器
// 其他寄存器...
} EMI_InitTypeDef;
// 初始化结构体实例
EMI_InitTypeDef EMI_InitStruct;
// 根据NAND闪存的具体型号和时序要求配置EMI
EMI_InitStruct.EMICR = 0x00000000; // 清除控制寄存器
EMI_InitStruct.EMI_BCR = 0x00000000; // 清除NAND控制寄存器
EMI_InitStruct.EMI_BTR = 0x00000000; // 根据NAND闪存的数据手册设置时序寄存器
// 将配置写入EMI控制器寄存器
*(__IO uint32_t *)(EMI_BASE) = EMI_InitStruct.EMICR;
*(volatile uint32_t *)(EMI_BASE + 0x04) = EMI_InitStruct.EMI_BCR;
*(volatile uint32_t *)(EMI_BASE + 0x08) = EMI_InitStruct.EMI_BTR;
// 其他寄存器配置...
在上面的代码中,我们定义了一个结构体 EMI_InitTypeDef 来保存所有的EMI相关寄存器的配置值。然后我们实例化这个结构体,并根据具体的存储器设备的数据手册设置相应的寄存器。最后,我们将这些设置应用到EMI控制器的实际寄存器中。
通过仔细调整这些参数,开发者可以显著提高外部存储器的性能,从而扩展微控制器的存储容量和提高数据处理速度。
4. 外设接口详情
外设接口是STM32F4微控制器与外部世界沟通的重要通道,不同的外设接口提供了多样化的通信和数据处理方式,以便为各种应用场景服务。本章节将详细介绍GPIO、ADC/DAC、以及通信接口的详细信息,让读者对STM32F4的外设接口有更深入的理解。
4.1 通用输入输出GPIO
STM32F4系列微控制器的通用输入输出端口(GPIO)允许用户根据需要配置每一个引脚,从而实现对微控制器与外部设备间的控制。
4.1.1 GPIO的结构和工作模式
STM32F4的GPIO端口被组织成多个组(GPIOA、GPIOB…等),每个组包含16个引脚。每个引脚可被配置为输入、输出、复用功能或模拟输入。
// 代码示例:GPIO配置为输出模式
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
// 使能GPIOA时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
// 配置GPIOA的PIN5为推挽输出模式,速度为50MHz
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
参数 GPIO_Pin 定义了要配置的引脚, GPIO_Mode 定义了引脚模式, GPIO_OType 定义了输出类型, GPIO_Speed 指定了输出速度, GPIO_PuPd 则定义了上下拉设置。
4.1.2 GPIO的高级配置和应用
除了基本的输入输出配置外,STM32F4的GPIO还支持高级特性,如外部中断和事件生成、模拟/数字信号选择以及唤醒系统的功能。
// 代码示例:GPIO配置为外部中断模式
void EXTI_Configuration(void)
{
EXTI_InitTypeDef EXTI_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
// 连接EXTI线到GPIO的PIN5
GPIO_EXTILineConfig(GPIO_PortSourceGPIOA, GPIO_PinSource5);
// 配置EXTI线
EXTI_InitStructure.EXTI_Line = EXTI_Line5;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure);
// 配置NVIC
NVIC_InitStructure.NVIC_IRQChannel = EXTI9_5_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x02;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x02;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
在此代码示例中,引脚配置为上升沿触发的外部中断模式,通过连接到中断控制器(EXTI),并配置中断优先级与使能中断通道。
4.2 模数转换器(ADC)和数模转换器(DAC)
STM32F4微控制器提供了高精度的ADC与DAC功能,对于模拟信号的处理和数字信号的输出提供了强大的硬件支持。
4.2.1 ADC的工作原理和配置
ADC转换器将模拟信号转换为数字信号,STM32F4的ADC模块具有快速转换能力及高精度,并支持多通道同时采样。
// 代码示例:ADC配置与读取
void ADC_Configuration(void)
{
ADC_ChannelConfTypeDef sConfig;
ADC_InitTypeDef ADC_InitStructure;
// 启动ADC1时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE);
// 配置ADC1的通道
ADC_InitStructure.ADC_Resolution = ADC_Resolution_12b;
ADC_InitStructure.ADC_ScanConvMode = DISABLE;
ADC_InitStructure.ADC_ContinuousConvMode = ENABLE;
ADC_InitStructure.ADC_ExternalTrigConvEdge = ADC_ExternalTrigConvEdge_None;
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;
ADC_InitStructure.ADC_NbrOfConversion = 1;
ADC_Init(ADC1, &ADC_InitStructure);
// 配置ADC1的通道0为转换序列的第一个
sConfig.ADC_Channel = ADC_Channel_0;
sConfig.ADC_SampleTime = ADC_SampleTime_3Cycles;
ADC_CASECChannelConfig(ADC1, &sConfig);
// 启动ADC1
ADC_Cmd(ADC1, ENABLE);
// 开始ADC1的软件转换
ADC_SoftwareStartConv(ADC1);
}
在上述代码中,ADC被配置为12位分辨率、单通道连续转换模式。通过配置ADC1的通道和采样时间,最终启动ADC转换并获取模拟信号的数字表示。
4.2.2 DAC的特性和使用场景
DAC模块将数字信号转换回模拟信号,通常用于生成模拟电压或波形输出。
// 代码示例:DAC输出配置
void DAC_Configuration(void)
{
DAC_InitTypeDef DAC_InitStructure;
// 启动DAC时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_DAC, ENABLE);
// 配置DAC
DAC_InitStructure.DAC_Trigger = DAC_Trigger_None;
DAC_InitStructure.DAC_WaveGeneration = DAC_WaveGeneration_None;
DAC_InitStructure.DAC_OutputBuffer = DAC_OutputBuffer_Enable;
DAC_Init(DAC_Channel_1, &DAC_InitStructure);
// 使能DAC通道1
DAC_Cmd(DAC_Channel_1, ENABLE);
// 设置DAC通道1的数据输出
DAC_SetChannel1Data(DAC_Align_12b_R, 0xFFF);
}
代码展示了如何配置DAC以输出固定值的数据,其中 DAC_SetChannel1Data 函数用于设定DAC输出的数值,这里设置为最大值0xFFF,使得DAC输出电压最大。
4.3 通信接口深入分析
STM32F4系列微控制器提供了丰富的通信接口,包括CAN、USB、SDIO等,为不同通信需求提供了灵活的选择。
4.3.1 CAN、USB、SDIO接口功能
这些接口各自具有不同的通信协议和应用场景。
- CAN总线接口用于汽车和工业自动化领域,实现了设备间的消息通信。
- USB接口可以用于多种USB设备的连接,例如USB鼠标、键盘、U盘等。
- SDIO接口广泛用于SD卡的读写操作,支持多媒体存储和数据交换。
4.3.2 接口的软件抽象层和硬件抽象层
STM32F4提供了底层硬件控制与上层应用之间的软件抽象层(SAL),便于开发人员进行通信协议的实现。
// 代码示例:USB接口初始化
void USB_Configuration(void)
{
// 初始化USB设备库
USB_Configuration(void) {
// 初始化USB设备库
USB_Init();
// 根据需要注册回调函数,处理USB事件等
// ...
}
}
通过初始化函数,USB设备库会被设置成合适的模式以响应USB事件,并进行相应的数据处理。
在本章节中,我们深入探讨了STM32F4的通用输入输出端口(GPIO)和模拟接口(ADC/DAC),以及各种通信接口(CAN、USB、SDIO)的详细信息。这些内容为读者提供了在实际项目中如何使用STM32F4外设接口的详细指导,是进行嵌入式开发不可或缺的一部分。
5. 嵌入式安全特性
随着物联网(IoT)设备和智能嵌入式系统的普及,嵌入式安全特性变得越来越重要。特别是在涉及敏感数据和重要操作的应用场景中,安全性必须得到充分的考虑和实施。STM32F4系列微控制器内置了一系列安全特性,旨在保护设备免受未授权访问,确保数据传输的保密性,并且防止代码被篡改。在本章中,我们将深入探讨STM32F4系列微控制器的硬件加密引擎功能,以及如何应用这些安全特性来保护您的嵌入式系统。
5.1 硬件加密引擎
5.1.1 加密算法支持和性能
STM32F4系列微控制器集成的硬件加密引擎支持多种加密算法,包括但不限于AES(高级加密标准)、DES(数据加密标准)、3DES(三重数据加密算法)、MD5(消息摘要算法5)、SHA-1(安全哈希算法1)和SHA-2(安全哈希算法2)。通过硬件加速,STM32F4可以高效执行数据加密和解密,同时也提供了硬件随机数生成器(RNG)来增强随机性的需求。
硬件加密引擎的性能对于执行加密任务的实时性至关重要,特别是在需要快速响应的场景中。STM32F4系列在AES加密和解密操作时,能够以高达1088Mbps的速率运行,这使得该系列微控制器能够应对最严格的实时安全要求。
5.1.2 安全引导流程和机制
除了加密算法的支持,STM32F4系列微控制器还支持安全引导(secure boot)流程。安全引导确保设备在每次启动时都能够加载并执行经过验证的固件,防止执行未授权或篡改过的代码。此过程通常涉及一个基于公钥基础设施(PKI)的认证机制。
STM32F4在启动过程中会利用内置的引导加载程序(bootloader)验证主应用程序的签名。这个过程依赖于一对密钥:一个公开的公钥和一个私有的密钥。公钥在设备出厂时就已嵌入,而私钥则由设备制造商妥善保管。设备上运行的应用程序必须使用相应的私钥进行签名。在引导加载程序阶段,系统会验证应用程序的签名是否与公钥匹配,只有验证通过后,程序才会被执行。
5.2 安全特性应用实例
5.2.1 硬件安全模块的配置和使用
为了使用STM32F4系列微控制器的硬件安全模块(HSM),开发者需要通过固件库来配置相关寄存器。下面是一个配置AES加密的代码示例:
// AES配置结构体
AES_InitTypeDef AES_InitStructure;
// 初始化加密引擎
AES_DeInit();
// 设置加密算法为AES-128,ECB模式
AES_InitStructure.AES_Mode = AES_Mode_ECB;
AES_InitStructure.AES_KEYSize = AES_KEYSize_128b;
AES_InitStructure.AES_Padding = AES_Padding_NoPadding;
AES_Init(&AES_InitStructure);
// 加载密钥
uint8_t aesKey[16] = { /* 密钥数据 */ };
AES_SetKey((uint8_t *)aesKey);
// 加密数据
uint8_t input[16] = { /* 待加密数据 */ };
uint8_t output[16];
AES_Encrypt((uint8_t *)input, (uint8_t *)output);
在这个代码块中,首先声明了一个 AES_InitTypeDef 结构体来配置AES模块,然后通过 AES_DeInit() 重置加密引擎,接着使用 AES_Init() 函数来设置工作模式和密钥长度,并使用 AES_SetKey() 加载密钥。最后使用 AES_Encrypt() 函数来执行实际的加密过程。
在实际项目中,密钥的生成和存储是非常关键的环节。通常需要确保密钥生成算法的安全性和密钥存储的安全性,例如使用硬件生成的随机密钥,并将其存储在安全的存储区域。
5.2.2 安全存储和加密通信
安全存储指的是确保数据存储在非易失性存储器中时得到保护,防止未授权的访问和篡改。STM32F4系列微控制器提供了多种安全存储机制,包括使用加密引擎加密数据,以及将数据保存在受保护的内存区域。
对于加密通信,STM32F4支持SSL/TLS协议栈,允许设备通过安全的通道进行数据传输。开发者可以使用STM32F4内置的硬件加速器来提高SSL/TLS加密过程的效率。
为了实现安全存储和加密通信,开发者应遵循一系列的安全实践和最佳实践。例如,使用加密引擎来加密重要的数据,通过SSL/TLS来保护网络通信,并定期更新固件和密钥,以降低被破解的风险。
在本章节中,我们对STM32F4系列微控制器的嵌入式安全特性进行了深入探讨。我们从硬件加密引擎的加密算法支持和安全引导流程开始,进而介绍了如何配置和使用硬件安全模块,以及如何在实际应用中实现安全存储和加密通信。通过这些信息和示例代码,开发者能够更好地理解并应用STM32F4的安全特性,为他们的嵌入式设备提供充分的保护。
6. 开发环境和固件库的使用指南
开发环境和固件库是进行STM32F4系列微控制器软件开发的基础。本章节将对如何搭建开发环境和使用固件库进行详细阐述。
6.1 开发环境搭建
开发STM32F4系列微控制器项目首先需要一个适合的开发环境。这通常包括编译器、调试器、集成开发环境(IDE)以及特定的硬件开发板。
6.1.1 必备软件和工具链介绍
对于STM32F4系列微控制器,最常用的开发环境是基于Eclipse的STM32CubeIDE,它集成了ARM Keil MDK、IAR EWARM以及GCC编译器。
- Keil MDK :适用于需要最高性能的应用程序,它包括了优化的C编译器、调试器、RTX实时操作系统。
- IAR EWARM :提供了一个具有高度优化和可靠性的开发平台,特别适合于对性能有严格要求的应用。
- GCC编译器 :开源且免费,适用于对成本敏感的项目。
- STM32CubeIDE :ST官方提供的集成开发环境,支持上述编译器,并集成了配置工具和STM32CubeMX,可以快速生成初始化代码。
6.1.2 环境配置步骤和验证
搭建开发环境的步骤大致如下:
- 下载安装 :根据选择的IDE和工具链,从官方网站下载并安装。
- 硬件连接 :使用ST-Link或J-Link等调试器将开发板连接至电脑。
- 创建项目 :在IDE中创建一个新项目,并根据微控制器型号选择正确的MCU。
- 配置环境 :根据项目需求配置编译器和链接器选项,导入必要的库文件。
- 编译验证 :编译项目并确保没有错误,这通常意味着环境配置正确。
示例代码块用于验证编译环境配置是否正确:
#include <stdio.h>
int main(void) {
printf("Hello, STM32F4!\n");
return 0;
}
使用上面的示例代码,如果编译器能够编译并生成一个可在目标硬件上运行的程序,则表示开发环境配置成功。
6.2 固件库的结构和功能
固件库是微控制器编程的基础,提供了硬件抽象层(HAL),简化了硬件资源的配置和使用。
6.2.1 固件库的主要组件
STM32F4固件库提供了以下主要组件:
- HAL库 :硬件抽象层,提供了一系列用于外设控制的高级API。
- LL库 :低层库,提供了直接访问寄存器的API。
- Middlewares :中间件组件,例如USB、TCP/IP协议栈等。
6.2.2 中断处理和外设驱动
固件库为中断处理和外设驱动提供了基础功能:
- 中断服务例程 :库函数中预定义了中断向量和中断服务例程模板。
- 外设驱动 :为常见的外设如GPIO、ADC、TIM等提供了驱动,这些驱动隐藏了寄存器级别的细节。
示例代码块展示如何使用HAL库初始化GPIO:
/* 初始化LED灯对应的GPIO */
void LED_Init(void) {
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* 启用GPIO端口时钟 */
__HAL_RCC_GPIOG_CLK_ENABLE();
/* 配置GPIO */
GPIO_InitStruct.Pin = GPIO_PIN_13; // 假设LED连接在PG13
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // 推挽输出模式
GPIO_InitStruct.Pull = GPIO_NOPULL; // 不使用上拉或下拉
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; // 低速
HAL_GPIO_Init(GPIOG, &GPIO_InitStruct);
/* 关闭LED灯 */
HAL_GPIO_WritePin(GPIOG, GPIO_PIN_13, GPIO_PIN_RESET);
}
6.3 应用程序开发流程
开发STM32F4系列微控制器的程序需要遵循一定的步骤,并掌握一些调试技巧。
6.3.1 开发步骤和调试技巧
开发STM32F4微控制器应用程序的典型步骤如下:
- 需求分析 :明确程序的功能、性能和资源使用要求。
- 软件设计 :设计软件架构,编写模块划分和接口定义。
- 编写代码 :根据设计编写代码,并使用固件库函数简化开发。
- 调试和测试 :使用调试器进行代码的单步调试,验证功能和性能。
在调试过程中,使用断点、变量监视和逻辑分析仪等工具来检查程序的运行状态。
6.3.2 性能优化和资源管理
为了优化性能和管理资源,开发者可以:
- 代码优化 :使用高效的算法和数据结构,减少不必要的计算。
- 资源使用 :合理分配内存和外设,避免资源冲突和浪费。
- 功耗管理 :利用睡眠模式和时钟控制减少功耗。
示例代码块展示如何优化功耗管理:
/* 使能睡眠模式 */
HAL_PWR_EnterSLEEPMode(PWR_MAINREGULATOR_ON, PWR_SLEEPENTRY_WFI);
此外,性能优化还包括合理使用中断、DMA传输、缓存优化等高级技术。在资源管理方面,运用内存池和动态内存分配策略,确保程序在有限的资源下高效运行。
以上这些知识点和技巧,是开发STM32F4微控制器应用程序的基础,通过实践,开发者可以逐步掌握并用于项目开发中。
简介:STM32F4系列微控制器具备高性能和低功耗特点,适用于多领域。该手册为初学者和有经验的开发者提供了全面的技术指导,包括处理器架构、内存配置、外设接口、存储器、嵌入式安全特性、开发工具、应用示例、电气特性、故障诊断等内容。初学者可通过本手册系统地学习STM32F4的基础知识,进阶用户可通过手册中的详细技术参数和应用指南优化设计和程序。建议进阶用户也参考英文资料以掌握最新技术。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 15
15 0
0- 0



 已为社区贡献176条内容
已为社区贡献176条内容

所有评论(0)