【完整源码+数据集+部署教程】外科手术工具分割系统源码&数据集分享 [yolov8-seg-slimneck&yolov8-seg-attention等50+全套改进创新点发刊_一键训练教程_Web
背景意义
随着医学技术的不断进步,外科手术的复杂性和精确性要求也日益提高。在外科手术中,手术工具的准确识别与分割对于提高手术的安全性和效率至关重要。传统的手术工具识别方法往往依赖于人工标注和经验判断,容易受到人为因素的影响,导致识别精度低、效率差。因此,开发一种基于深度学习的自动化手术工具分割系统,能够有效提升手术过程中的工具识别能力,成为当前医学影像处理领域的重要研究方向。
近年来,YOLO(You Only Look Once)系列模型因其优越的实时检测性能而广泛应用于目标检测和分割任务。YOLOv8作为该系列的最新版本,结合了多种先进的深度学习技术,具有更高的检测精度和更快的处理速度。通过对YOLOv8进行改进,针对外科手术工具的特定需求进行优化,可以有效提升其在手术场景中的应用效果。尤其是在手术过程中,快速、准确地识别和分割不同类型的手术工具,能够为外科医生提供实时的视觉辅助,减少手术失误,提高患者的安全性。
本研究所使用的数据集“surgical_tool_segmentation_mj”包含4100张图像,涵盖15种不同类别的外科手术工具,包括各种夹钳、镊子、针持器、切割器等。这些工具在手术中发挥着不可或缺的作用,准确的分割和识别能够帮助医生更好地进行操作,减少手术时间和并发症的发生。此外,数据集的多样性和丰富性为模型的训练提供了良好的基础,使得模型能够在不同的手术场景中具备较强的泛化能力。
通过对YOLOv8的改进,我们将探索其在外科手术工具分割中的应用潜力,研究如何通过优化网络结构、调整损失函数和增强数据集等方式,提高模型的分割精度和实时性。此项研究不仅具有重要的理论意义,也为实际手术提供了切实可行的技术支持。通过实现高效的外科手术工具分割系统,我们希望能够推动智能医疗的发展,提升外科手术的智能化水平,为患者提供更安全、更高效的医疗服务。
综上所述,基于改进YOLOv8的外科手术工具分割系统的研究,不仅能够填补现有技术在手术工具识别领域的空白,更将为外科手术的智能化、自动化提供新的思路和方法。通过深入研究和实践应用,我们期待能够为未来的医疗技术发展做出积极贡献,推动外科手术向更高效、更安全的方向迈进。
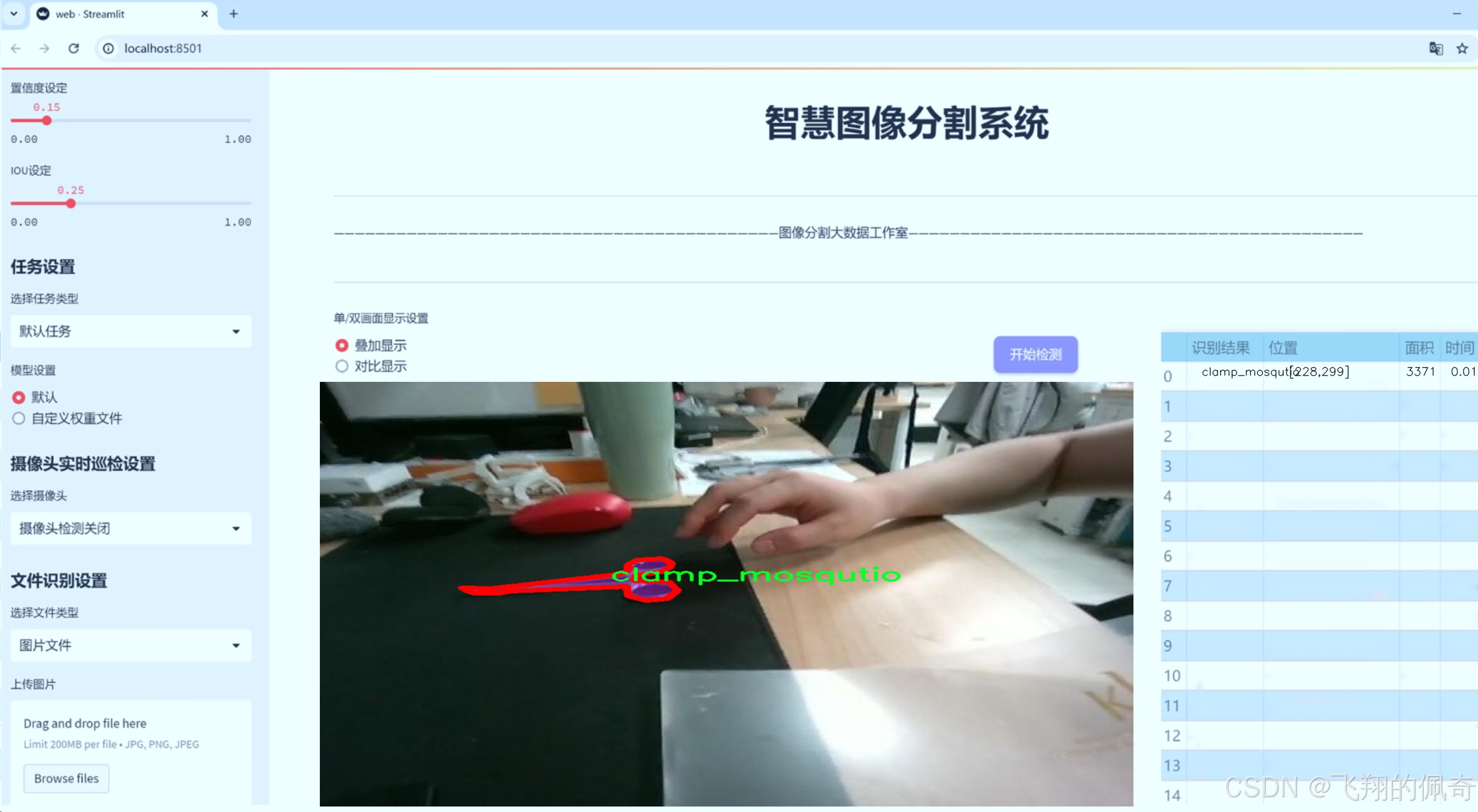
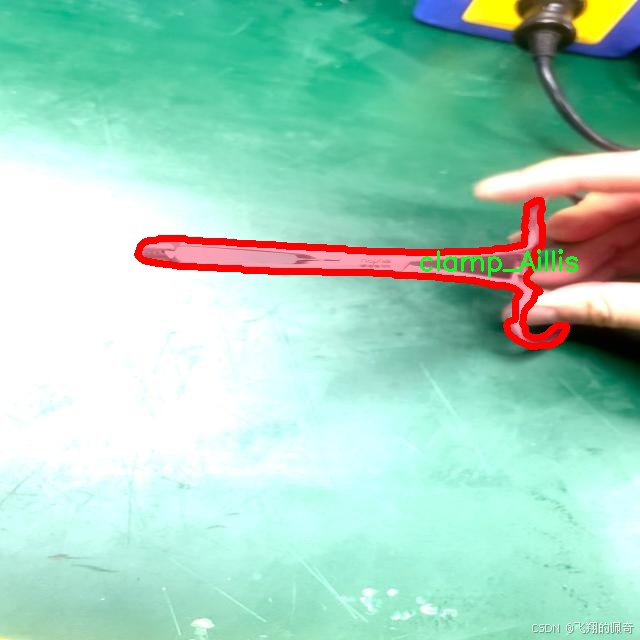
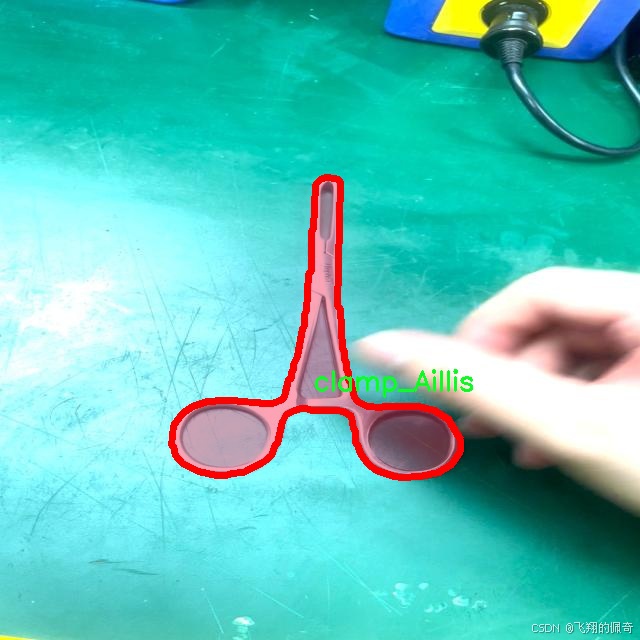
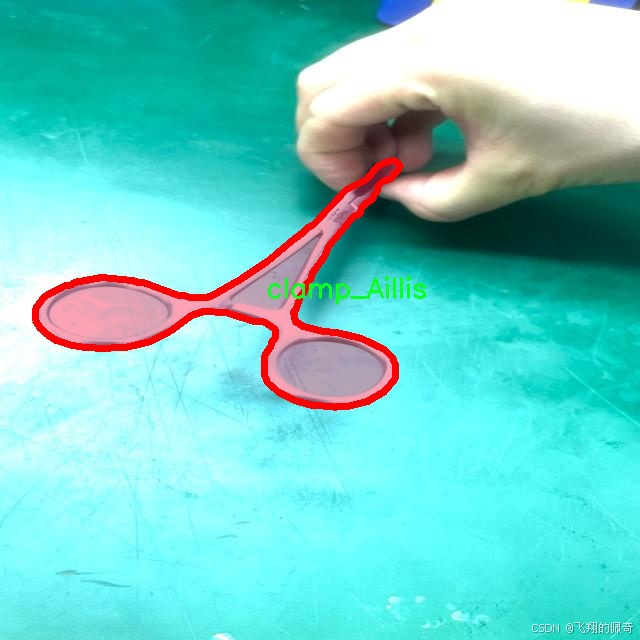
图片效果


数据集信息
在外科手术领域,精确的工具分割对于提高手术效率和安全性至关重要。为此,我们构建了一个名为“surgical_tool_segmentation_mj”的数据集,旨在为改进YOLOv8-seg的外科手术工具分割系统提供强有力的支持。该数据集包含15个不同类别的外科工具,每个类别都经过精心标注,以确保模型能够在实际应用中准确识别和分割这些工具。
该数据集的类别包括多种常见的外科工具,具体包括:Aillis夹钳、Kelly夹钳、蚊式夹钳、海绵夹钳、长型镊子、宽型镊子、14号针持器、20号针持器、穿刺器、军用牵开器、Senn B型牵开器、Senn S型牵开器、梅尔森鲍姆剪刀、梅尔森剪刀以及手术剪刀。这些工具在外科手术中发挥着重要作用,各自具有独特的功能和用途。通过对这些工具的精确分割,外科医生能够更好地识别和使用它们,从而提高手术的成功率和患者的安全性。
数据集的构建过程涉及大量的图像采集和标注工作。我们从多种手术场景中收集了丰富的图像数据,确保涵盖不同的手术类型和环境。每个图像都经过专业人员的仔细标注,确保每个工具的边界和特征都被准确捕捉。这种高质量的标注不仅为模型训练提供了可靠的数据基础,也为后续的评估和验证提供了必要的支持。
在训练过程中,YOLOv8-seg模型将利用这些标注数据进行学习,以识别和分割不同类别的外科工具。通过不断迭代和优化,模型将逐步提高其在实际应用中的表现,能够在复杂的手术场景中快速、准确地识别出各种工具。这对于外科医生来说,无疑是一个重要的辅助工具,能够显著提升他们的工作效率。
此外,数据集的多样性和丰富性也为模型的泛化能力提供了保障。通过在不同的手术环境和条件下进行训练,模型将能够适应各种变化,确保在实际应用中保持高效的识别和分割能力。这对于应对复杂的手术场景和突发情况尤为重要。
总之,“surgical_tool_segmentation_mj”数据集不仅为改进YOLOv8-seg的外科手术工具分割系统提供了坚实的基础,也为未来的研究和应用开辟了新的方向。通过对外科工具的精准分割,我们期待能够为外科手术的智能化和自动化贡献一份力量,从而提升整个医疗行业的效率和安全性。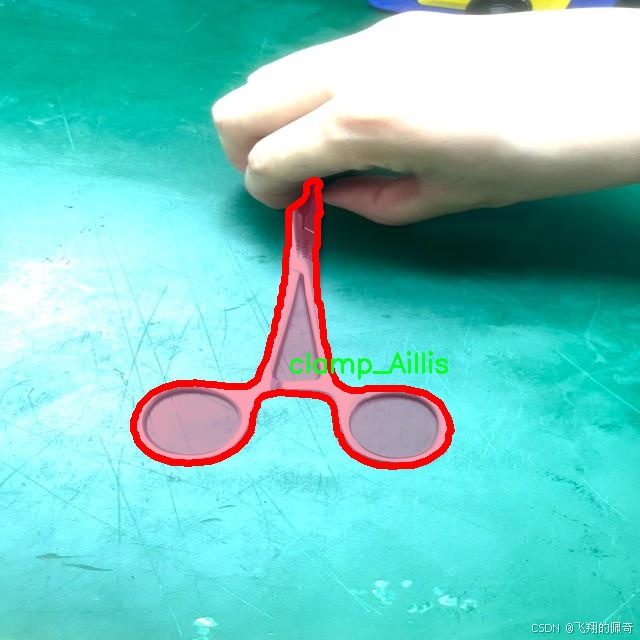

核心代码
```python
# 导入必要的库
from pathlib import Path
import torch
from ultralytics.engine.model import Model
from ultralytics.utils.torch_utils import model_info, smart_inference_mode
from .predict import NASPredictor
from .val import NASValidator
class NAS(Model):
"""
YOLO NAS模型用于目标检测。
该类提供了YOLO-NAS模型的接口,并扩展了Ultralytics引擎中的`Model`类。
它旨在通过预训练或自定义训练的YOLO-NAS模型来简化目标检测任务。
属性:
model (str): 预训练模型的路径或模型名称。默认为'yolo_nas_s.pt'。
注意:
YOLO-NAS模型仅支持预训练模型。请勿提供YAML配置文件。
"""
def __init__(self, model='yolo_nas_s.pt') -> None:
"""初始化NAS模型,使用提供的或默认的'yolo_nas_s.pt'模型。"""
# 确保提供的模型文件不是YAML格式
assert Path(model).suffix not in ('.yaml', '.yml'), 'YOLO-NAS模型仅支持预训练模型。'
# 调用父类构造函数,初始化模型
super().__init__(model, task='detect')
@smart_inference_mode()
def _load(self, weights: str, task: str):
"""加载现有的NAS模型权重,或如果未提供,则创建一个新的NAS模型并使用预训练权重。"""
import super_gradients
suffix = Path(weights).suffix # 获取权重文件的后缀
if suffix == '.pt':
self.model = torch.load(weights) # 从.pt文件加载模型
elif suffix == '':
# 从super_gradients库获取预训练模型
self.model = super_gradients.training.models.get(weights, pretrained_weights='coco')
# 标准化模型
self.model.fuse = lambda verbose=True: self.model # 定义fuse方法
self.model.stride = torch.tensor([32]) # 设置模型步幅
self.model.names = dict(enumerate(self.model._class_names)) # 设置类别名称
self.model.is_fused = lambda: False # 定义is_fused方法
self.model.yaml = {} # 清空yaml信息
self.model.pt_path = weights # 设置权重文件路径
self.model.task = 'detect' # 设置任务类型为检测
def info(self, detailed=False, verbose=True):
"""
记录模型信息。
参数:
detailed (bool): 是否显示模型的详细信息。
verbose (bool): 控制输出的详细程度。
"""
return model_info(self.model, detailed=detailed, verbose=verbose, imgsz=640)
@property
def task_map(self):
"""返回一个字典,将任务映射到相应的预测器和验证器类。"""
return {'detect': {'predictor': NASPredictor, 'validator': NASValidator}}
代码核心部分分析
- 类定义:
NAS类继承自Model类,主要用于实现YOLO-NAS模型的目标检测功能。 - 初始化方法:
__init__方法中检查模型文件格式,并调用父类的初始化方法。 - 加载模型:
_load方法负责加载模型权重,支持从.pt文件或其他预训练模型获取权重,并进行必要的模型标准化设置。 - 模型信息:
info方法用于输出模型的基本信息,可以选择详细程度。 - 任务映射:
task_map属性提供了任务与相应的预测器和验证器的映射关系,便于后续的调用和管理。
通过这些核心部分,用户可以方便地使用YOLO-NAS模型进行目标检测任务。```
这个文件是一个关于YOLO-NAS模型的接口实现,主要用于目标检测任务。它继承自Ultralytics引擎中的Model类,提供了使用预训练或自定义训练的YOLO-NAS模型的功能。
在文件开头,有一个简短的示例,展示了如何导入NAS类并使用它来加载模型和进行预测。用户可以通过指定模型名称(如’yolo_nas_s’)来创建模型实例,并调用predict方法对图像进行推理。
NAS类的构造函数__init__接受一个模型路径或名称作为参数,默认值为’yolo_nas_s.pt’。在初始化时,它会检查提供的模型文件是否为YAML格式,因为YOLO-NAS模型只支持预训练模型,而不支持YAML配置文件。
_load方法用于加载模型权重。如果提供的权重文件是以.pt结尾的,它会直接加载该文件;如果没有后缀,则会使用super_gradients库中的模型获取功能来加载预训练权重。此方法还会对模型进行标准化设置,包括模型的融合、步幅、类别名称等属性的初始化。
info方法用于记录模型的信息,用户可以选择是否显示详细信息和控制输出的详细程度。
最后,task_map属性返回一个字典,映射任务到相应的预测器和验证器类,这里主要是针对目标检测任务,分别对应NASPredictor和NASValidator类。
总体来说,这个文件为YOLO-NAS模型提供了一个清晰的接口,使得用户能够方便地进行目标检测任务的模型加载和推理。
```python
# Ultralytics YOLO 🚀, AGPL-3.0 license
# YOLO(You Only Look Once)是一种用于目标检测的深度学习模型。
# Ultralytics 是 YOLO 的一个实现版本,提供了高效的训练和推理功能。
# 该代码的主要功能是实现 YOLO 模型的训练和推理,具体步骤包括:
# 1. 数据准备:加载和预处理数据集。
# 2. 模型定义:构建 YOLO 模型架构。
# 3. 训练过程:使用训练数据对模型进行训练。
# 4. 推理过程:使用训练好的模型对新图像进行目标检测。
# 下面是一个简化的 YOLO 模型训练和推理的核心代码示例:
# 导入必要的库
import torch # PyTorch 是一个流行的深度学习框架
from models.yolo import Model # 导入 YOLO 模型定义
from utils.datasets import LoadImagesAndLabels # 导入数据加载工具
from utils.loss import ComputeLoss # 导入损失计算工具
# 定义模型参数
model = Model(cfg='yolov5s.yaml', ch=3, nc=80) # 初始化 YOLO 模型,配置文件指定模型结构和类别数
# 加载数据集
dataset = LoadImagesAndLabels('data/coco.yaml', img_size=640) # 加载 COCO 数据集,设置图像大小为 640
# 训练模型
for epoch in range(num_epochs): # 遍历每个训练周期
for imgs, targets in dataset: # 遍历数据集中的每个图像和目标
preds = model(imgs) # 使用模型进行前向推理
loss = ComputeLoss(preds, targets) # 计算损失
loss.backward() # 反向传播,更新模型参数
# 推理过程
img = load_image('path/to/image.jpg') # 加载待检测的图像
predictions = model(img) # 使用训练好的模型进行推理
注释说明:
- 导入库:引入了 PyTorch 和 YOLO 模型相关的工具库。
- 模型定义:通过配置文件初始化 YOLO 模型,指定输入通道数和类别数。
- 数据加载:使用自定义的数据加载工具,加载指定数据集,并设置图像的输入大小。
- 训练过程:通过循环遍历训练周期和数据集,进行模型的前向推理、损失计算和反向传播。
- 推理过程:加载待检测的图像,并使用训练好的模型进行目标检测,输出预测结果。
这个简化的代码示例展示了 YOLO 模型的基本训练和推理流程,核心部分主要集中在模型的定义、数据的加载、训练和推理的实现上。```
该文件是Ultralytics YOLO项目的一部分,文件名为__init__.py,它通常用于标识一个Python包。文件开头的注释表明该项目遵循AGPL-3.0许可证,这是一种开源许可证,允许用户自由使用、修改和分发软件,但要求任何分发的修改版本也必须以相同的许可证发布。
在Python中,__init__.py文件的存在使得Python能够将包含该文件的目录视为一个包,从而可以导入该目录下的模块和子模块。虽然在这个特定的代码片段中没有其他代码或功能实现,但通常情况下,这个文件可能会包含初始化代码,或者定义包的公共接口。
在Ultralytics YOLO项目中,models目录可能包含与YOLO模型相关的各种功能和工具,而utils子目录则可能包含一些实用的辅助函数或类,以支持模型的训练、推理或其他操作。通过将这些功能组织在一个包中,开发者可以更方便地管理和使用这些工具。
总的来说,这个__init__.py文件的主要作用是使得utils目录成为一个可导入的Python包,并为该包的使用提供必要的许可证信息。
import sys
import subprocess
def run_script(script_path):
"""
使用当前 Python 环境运行指定的脚本。
Args:
script_path (str): 要运行的脚本路径
Returns:
None
"""
# 获取当前 Python 解释器的路径
python_path = sys.executable
# 构建运行命令,使用 streamlit 运行指定的脚本
command = f'"{python_path}" -m streamlit run "{script_path}"'
# 执行命令
result = subprocess.run(command, shell=True)
# 检查命令执行的返回码,0 表示成功,非0表示出错
if result.returncode != 0:
print("脚本运行出错。")
# 实例化并运行应用
if __name__ == "__main__":
# 指定要运行的脚本路径
script_path = "web.py" # 假设脚本在当前目录下
# 调用函数运行脚本
run_script(script_path)
代码核心部分及注释说明:
-
导入模块:
import sys: 导入系统相关的模块,用于获取当前 Python 解释器的路径。import subprocess: 导入子进程模块,用于执行外部命令。
-
定义
run_script函数:- 该函数接收一个参数
script_path,表示要运行的 Python 脚本的路径。 - 使用
sys.executable获取当前 Python 解释器的路径,以便在命令中调用。 - 构建命令字符串,使用
streamlit运行指定的脚本。 - 使用
subprocess.run执行构建的命令,并检查返回码以判断脚本是否成功运行。
- 该函数接收一个参数
-
主程序入口:
- 使用
if __name__ == "__main__":确保该代码块仅在直接运行该脚本时执行。 - 指定要运行的脚本路径(在这里假设为 “web.py”)。
- 调用
run_script函数,传入脚本路径以执行该脚本。```
这个程序文件名为ui.py,主要功能是通过当前的 Python 环境来运行一个指定的脚本,具体是一个名为web.py的文件。程序首先导入了必要的模块,包括sys、os和subprocess,这些模块分别用于获取系统信息、操作系统功能和执行外部命令。
- 使用
在 run_script 函数中,首先获取当前 Python 解释器的路径,这通过 sys.executable 实现。接着,构建一个命令字符串,该命令用于运行 streamlit,这是一个用于构建数据应用的框架。命令的格式是 python -m streamlit run "script_path",其中 script_path 是要运行的脚本的路径。
使用 subprocess.run 方法执行这个命令,shell=True 参数表示在 shell 中执行命令。执行后,程序会检查返回的状态码,如果返回码不为 0,说明脚本运行出错,此时会打印出错误信息。
在文件的最后部分,使用 if __name__ == "__main__": 语句来确保只有在直接运行该文件时才会执行后面的代码。在这里,首先调用 abs_path 函数来获取 web.py 的绝对路径,然后调用 run_script 函数来运行这个脚本。
总体来说,这个程序的核心功能是封装了一个简单的命令行接口,用于启动一个基于 Streamlit 的 Web 应用,方便用户在命令行中直接运行指定的 Python 脚本。
```python
import torch
import torch.nn as nn
import torch.nn.functional as F
def bbox_overlaps(bboxes1, bboxes2, mode='iou', is_aligned=False, eps=1e-6):
"""计算两个边界框集合之间的重叠度(IoU)。"""
# 确保输入的边界框格式正确
assert (bboxes1.size(-1) == 4 or bboxes1.size(0) == 0)
assert (bboxes2.size(-1) == 4 or bboxes2.size(0) == 0)
# 确保批次维度相同
assert bboxes1.shape[:-2] == bboxes2.shape[:-2]
batch_shape = bboxes1.shape[:-2]
rows = bboxes1.size(-2) # bboxes1的数量
cols = bboxes2.size(-2) # bboxes2的数量
if is_aligned:
assert rows == cols # 如果对齐,数量必须相同
# 如果没有边界框,返回空张量
if rows * cols == 0:
return bboxes1.new(batch_shape + (rows,)) if is_aligned else bboxes1.new(batch_shape + (rows, cols))
# 计算每个边界框的面积
area1 = (bboxes1[..., 2] - bboxes1[..., 0]) * (bboxes1[..., 3] - bboxes1[..., 1])
area2 = (bboxes2[..., 2] - bboxes2[..., 0]) * (bboxes2[..., 3] - bboxes2[..., 1])
# 计算重叠区域的左上角和右下角坐标
lt = torch.max(bboxes1[..., :2], bboxes2[..., :2]) # 左上角
rb = torch.min(bboxes1[..., 2:], bboxes2[..., 2:]) # 右下角
# 计算重叠区域的宽和高
wh = (rb - lt).clamp(min=0) # 确保不小于0
overlap = wh[..., 0] * wh[..., 1] # 重叠面积
# 计算并确保不为零的并集面积
union = area1 + area2 - overlap + eps
ious = overlap / union # 计算IoU
return ious # 返回IoU
class ATSSAssigner(nn.Module):
'''自适应训练样本选择分配器'''
def __init__(self, topk=9, num_classes=80):
super(ATSSAssigner, self).__init__()
self.topk = topk # 每个GT选择的候选框数量
self.num_classes = num_classes # 类别数量
self.bg_idx = num_classes # 背景类别索引
@torch.no_grad()
def forward(self, anc_bboxes, n_level_bboxes, gt_labels, gt_bboxes, mask_gt, pd_bboxes):
"""前向传播,计算目标标签、边界框和分数。"""
self.n_anchors = anc_bboxes.size(0) # 总锚框数量
self.bs = gt_bboxes.size(0) # 批次大小
self.n_max_boxes = gt_bboxes.size(1) # 每个批次最大边界框数量
# 如果没有GT框,返回背景标签和零的边界框
if self.n_max_boxes == 0:
device = gt_bboxes.device
return (
torch.full([self.bs, self.n_anchors], self.bg_idx).to(device),
torch.zeros([self.bs, self.n_anchors, 4]).to(device),
torch.zeros([self.bs, self.n_anchors, self.num_classes]).to(device),
torch.zeros([self.bs, self.n_anchors]).to(device)
)
# 计算IoU和距离
overlaps = bbox_overlaps(gt_bboxes.reshape([-1, 4]), anc_bboxes)
overlaps = overlaps.reshape([self.bs, -1, self.n_anchors])
distances, ac_points = dist_calculator(gt_bboxes.reshape([-1, 4]), anc_bboxes)
distances = distances.reshape([self.bs, -1, self.n_anchors])
# 选择候选框
is_in_candidate, candidate_idxs = self.select_topk_candidates(distances, n_level_bboxes, mask_gt)
# 计算IoU阈值
overlaps_thr_per_gt, iou_candidates = self.thres_calculator(is_in_candidate, candidate_idxs, overlaps)
# 选择正样本
is_pos = torch.where(iou_candidates > overlaps_thr_per_gt.repeat([1, 1, self.n_anchors]),
is_in_candidate, torch.zeros_like(is_in_candidate))
# 获取目标
target_labels, target_bboxes, target_scores = self.get_targets(gt_labels, gt_bboxes, target_gt_idx, fg_mask)
return target_labels, target_bboxes, target_scores, fg_mask.bool(), target_gt_idx
# 其他辅助函数省略...
代码说明:
- bbox_overlaps:计算两个边界框集合之间的重叠度(IoU)。该函数接受两个边界框张量,并返回它们的IoU值。
- ATSSAssigner:自适应训练样本选择分配器类,负责将锚框与真实边界框进行匹配,并生成目标标签、边界框和分数。
- forward:前向传播方法,计算分配给每个锚框的目标标签、边界框和分数。
- select_topk_candidates、thres_calculator、get_targets等辅助函数用于处理候选框选择、阈值计算和目标生成等任务。```
这个程序文件ultralytics/utils/atss.py主要实现了自适应训练样本选择(Adaptive Training Sample Selection,ATSS)算法的相关功能,主要用于目标检测任务中。文件中包含多个函数和一个类,下面是对这些内容的逐一讲解。
首先,文件导入了必要的库,包括torch和torch.nn,并引入了一些其他模块中的函数。接下来定义了几个函数。
generate_anchors函数用于根据特征图生成锚框(anchors)。它接收特征图、特征图的步幅、网格单元大小和偏移量等参数。根据不同的模式(anchor-free或anchor-based),该函数会生成不同形状的锚框和锚点。对于评估模式,函数会生成锚点和步幅张量;而在训练模式下,则会生成完整的锚框。
fp16_clamp函数用于对张量进行数值限制,特别是针对半精度浮点数(float16)的情况,确保数值不会超出设定的范围。
bbox_overlaps函数计算两个边界框集合之间的重叠情况,支持多种重叠计算模式(如IoU、IoF和GIoU)。它可以处理批量数据,并且在计算时考虑了数值稳定性。该函数的实现考虑了内存使用和计算效率,特别是在处理大规模数据时。
cast_tensor_type和iou2d_calculator函数用于将张量转换为特定的数据类型并计算2D边界框之间的重叠。
dist_calculator函数计算所有边界框与真实边界框之间的中心距离,返回距离和锚点。
iou_calculator函数用于批量计算IoU,接收两个边界框集合作为输入,并返回它们之间的IoU值。
接下来定义了ATSSAssigner类,它是ATSS算法的核心实现。类的构造函数初始化了一些参数,如topk和num_classes。forward方法是该类的主要功能,接收锚框、真实边界框、标签等信息,计算并返回目标标签、目标边界框、目标分数和前景掩码。
在forward方法中,首先检查真实边界框的数量,如果没有真实框,则返回背景标签和零值的目标框和目标分数。接着,计算真实框与锚框之间的IoU和距离。然后,选择候选框,并根据IoU阈值选择正样本。最后,调用get_targets方法获取目标标签、目标边界框和目标分数。
select_topk_candidates、thres_calculator和get_targets等辅助方法用于处理候选框的选择、阈值计算和目标的生成。
整体来看,这个文件实现了ATSS算法的核心逻辑,旨在提高目标检测模型的训练效率和准确性,通过自适应选择训练样本来优化模型的学习过程。
```python
import os
import torch
import yaml
from ultralytics import YOLO # 导入YOLO模型
if __name__ == '__main__': # 确保该模块被直接运行时才执行以下代码
# 设置训练参数
workers = 1 # 数据加载的工作进程数量
batch = 8 # 每个批次的样本数量,视显存情况调整
device = "0" if torch.cuda.is_available() else "cpu" # 判断是否使用GPU
# 获取数据集配置文件的绝对路径
data_path = abs_path(f'datasets/data/data.yaml', path_type='current')
# 将路径格式转换为Unix风格
unix_style_path = data_path.replace(os.sep, '/')
# 获取数据集目录路径
directory_path = os.path.dirname(unix_style_path)
# 读取YAML文件,保持原有顺序
with open(data_path, 'r') as file:
data = yaml.load(file, Loader=yaml.FullLoader)
# 修改数据集路径
if 'train' in data and 'val' in data and 'test' in data:
data['train'] = directory_path + '/train' # 更新训练集路径
data['val'] = directory_path + '/val' # 更新验证集路径
data['test'] = directory_path + '/test' # 更新测试集路径
# 将修改后的数据写回YAML文件
with open(data_path, 'w') as file:
yaml.safe_dump(data, file, sort_keys=False)
# 加载YOLO模型配置文件和预训练权重
model = YOLO(r"C:\codeseg\codenew\50+种YOLOv8算法改进源码大全和调试加载训练教程(非必要)\改进YOLOv8模型配置文件\yolov8-seg-C2f-Faster.yaml").load("./weights/yolov8s-seg.pt")
# 开始训练模型
results = model.train(
data=data_path, # 指定训练数据的配置文件路径
device=device, # 指定使用的设备(GPU或CPU)
workers=workers, # 指定数据加载的工作进程数量
imgsz=640, # 指定输入图像的大小为640x640
epochs=100, # 指定训练的轮数为100
batch=batch, # 指定每个批次的样本数量
)
代码注释说明:
- 导入必要的库:导入了操作系统、PyTorch、YAML处理库和YOLO模型。
- 主程序入口:通过
if __name__ == '__main__':确保只有在直接运行该脚本时才执行后续代码。 - 设置训练参数:定义了数据加载的工作进程数量、批次大小和设备类型(GPU或CPU)。
- 获取数据集配置文件路径:使用
abs_path函数获取数据集的YAML配置文件的绝对路径。 - 读取和修改YAML文件:读取YAML文件,更新训练、验证和测试集的路径,并将修改后的内容写回文件。
- 加载YOLO模型:根据指定的配置文件和预训练权重加载YOLO模型。
- 开始训练模型:调用
model.train方法进行模型训练,传入必要的参数,如数据路径、设备、工作进程数量、图像大小、训练轮数和批次大小。```
这个程序文件train.py是一个用于训练 YOLO(You Only Look Once)模型的脚本,主要使用了 PyTorch 框架和 Ultralytics 提供的 YOLO 实现。以下是对代码的逐行讲解。
首先,程序导入了必要的库,包括 os、torch、yaml 和 matplotlib。其中,ultralytics 库用于导入 YOLO 模型,QtFusion.path 用于处理路径,matplotlib 则用于绘图,设置为 TkAgg 后端。
在 if __name__ == '__main__': 这一部分,确保该模块被直接运行时才会执行以下代码。首先设置了一些训练参数,包括 workers(工作进程数)为 1,batch(每个批次的大小)为 8。device 变量用于判断是否可以使用 GPU,如果可以则设置为 “0”(表示使用第一个 GPU),否则使用 CPU。
接下来,程序通过 abs_path 函数获取数据集配置文件 data.yaml 的绝对路径,并将路径中的分隔符统一为 Unix 风格的斜杠 /。然后,通过 os.path.dirname 获取该路径的目录部分。
程序打开 data.yaml 文件并读取内容,使用 yaml.load 方法保持原有顺序。读取后,检查 YAML 文件中是否包含 train、val 和 test 字段,如果包含,则将这些字段的路径修改为当前目录下的 train、val 和 test 文件夹,并将修改后的内容写回 YAML 文件。
接下来,程序加载 YOLO 模型,指定模型配置文件的路径,并加载预训练的权重文件 yolov8s-seg.pt。此处的模型配置文件可以根据需要更换,程序中也给出了其他模型配置文件的示例。
最后,调用 model.train 方法开始训练模型,传入训练数据的配置文件路径、设备、工作进程数、输入图像大小(640x640)、训练的 epoch 数(100)以及批次大小(8)等参数。
总的来说,这个脚本的主要功能是配置和启动 YOLO 模型的训练过程,确保数据路径正确,并允许用户根据计算资源的不同进行适当的参数调整。
```python
# 导入必要的库
from ultralytics.utils import LOGGER, RANK, SETTINGS, TESTS_RUNNING, ops
import os
from pathlib import Path
# 确保在非测试环境下运行
try:
assert not TESTS_RUNNING # 确保不在pytest测试中
assert SETTINGS['comet'] is True # 确保Comet集成已启用
import comet_ml # 导入Comet库
assert hasattr(comet_ml, '__version__') # 确保Comet库不是目录
except (ImportError, AssertionError):
comet_ml = None # 如果导入失败,则将comet_ml设置为None
def _create_experiment(args):
"""在分布式训练中确保实验对象仅在单个进程中创建。"""
if RANK not in (-1, 0): # 仅在主进程中创建实验
return
try:
comet_mode = _get_comet_mode() # 获取Comet模式
_project_name = os.getenv('COMET_PROJECT_NAME', args.project) # 获取项目名称
experiment = _get_experiment_type(comet_mode, _project_name) # 创建实验对象
experiment.log_parameters(vars(args)) # 记录参数
# 记录其他设置
experiment.log_others({
'eval_batch_logging_interval': _get_eval_batch_logging_interval(),
'log_confusion_matrix_on_eval': _should_log_confusion_matrix(),
'log_image_predictions': _should_log_image_predictions(),
'max_image_predictions': _get_max_image_predictions_to_log(),
})
experiment.log_other('Created from', 'yolov8') # 记录创建来源
except Exception as e:
LOGGER.warning(f'WARNING ⚠️ Comet安装但未正确初始化,未记录此运行。 {e}')
def on_train_epoch_end(trainer):
"""在训练周期结束时记录指标和保存批次图像。"""
experiment = comet_ml.get_global_experiment() # 获取全局实验对象
if not experiment:
return
metadata = _fetch_trainer_metadata(trainer) # 获取训练元数据
curr_epoch = metadata['curr_epoch'] # 当前周期
curr_step = metadata['curr_step'] # 当前步骤
# 记录训练损失指标
experiment.log_metrics(
trainer.label_loss_items(trainer.tloss, prefix='train'),
step=curr_step,
epoch=curr_epoch,
)
# 如果是第一个周期,记录训练批次图像
if curr_epoch == 1:
_log_images(experiment, trainer.save_dir.glob('train_batch*.jpg'), curr_step)
def on_train_end(trainer):
"""在训练结束时执行操作。"""
experiment = comet_ml.get_global_experiment() # 获取全局实验对象
if not experiment:
return
metadata = _fetch_trainer_metadata(trainer) # 获取训练元数据
curr_epoch = metadata['curr_epoch'] # 当前周期
curr_step = metadata['curr_step'] # 当前步骤
_log_model(experiment, trainer) # 记录最佳训练模型
_log_confusion_matrix(experiment, trainer, curr_step, curr_epoch) # 记录混淆矩阵
_log_image_predictions(experiment, trainer.validator, curr_step) # 记录图像预测
experiment.end() # 结束实验
# 定义回调函数
callbacks = {
'on_train_epoch_end': on_train_epoch_end,
'on_train_end': on_train_end
} if comet_ml else {}
代码核心部分说明:
- 导入库:导入必要的库,包括Ultralytics和Comet用于日志记录。
- 实验创建:
_create_experiment函数确保在分布式训练中仅在主进程中创建Comet实验,并记录参数和其他设置。 - 训练周期结束:
on_train_epoch_end函数在每个训练周期结束时记录损失指标和图像。 - 训练结束:
on_train_end函数在训练结束时记录模型、混淆矩阵和图像预测,并结束实验。 - 回调函数:定义了在训练过程中调用的回调函数,以便在特定事件发生时执行相应的操作。```
这个程序文件是用于与Comet.ml集成的回调函数,主要用于在训练YOLO模型时记录和可视化训练过程中的各种信息。文件首先导入了一些必要的模块和设置,包括日志记录、环境变量、以及Comet.ml库。接着,它通过一系列的断言确保在测试运行时不记录日志,并验证Comet集成是否启用。
程序中定义了一些辅助函数,这些函数用于获取环境变量中的设置,比如Comet的模式、模型名称、评估批次日志记录间隔、最大图像预测数量等。还有一些函数用于确定是否需要记录混淆矩阵和图像预测。
在创建实验的过程中,程序确保在分布式训练中只在一个进程中创建实验对象,并记录相关参数和设置。接下来的函数主要用于获取训练过程中的元数据,包括当前的epoch、步骤、是否保存资产等。
程序还包含了一些用于处理边界框和注释的函数。这些函数将YOLO模型的预测结果和真实标签格式化为适合Comet.ml记录的格式,并进行必要的缩放和转换,以便在原始图像尺寸上进行可视化。
在训练过程中,程序会记录混淆矩阵、图像和模型等信息。它定义了一些回调函数,这些函数在训练的不同阶段被调用,比如在预训练开始时、每个训练epoch结束时、模型拟合epoch结束时和训练结束时。这些回调函数负责记录当前的训练指标、保存模型、记录图像预测、以及生成和记录评估图表。
最后,程序将这些回调函数以字典的形式组织起来,以便在Comet.ml可用时进行调用。整体而言,这个文件为YOLO模型的训练过程提供了全面的监控和记录功能,便于用户分析和优化模型性能。
源码文件
源码获取
欢迎大家点赞、收藏、关注、评论啦 、查看👇🏻获取联系方式👇🏻

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 16
16 0
0- 0



 已为社区贡献250条内容
已为社区贡献250条内容

所有评论(0)