35d四桥臂三维空间矢量调制算法仿真探索
·
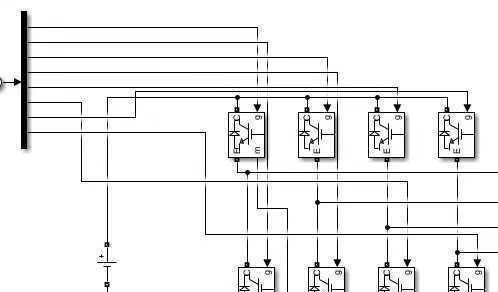
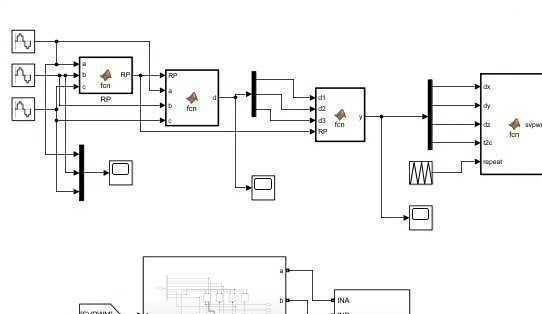
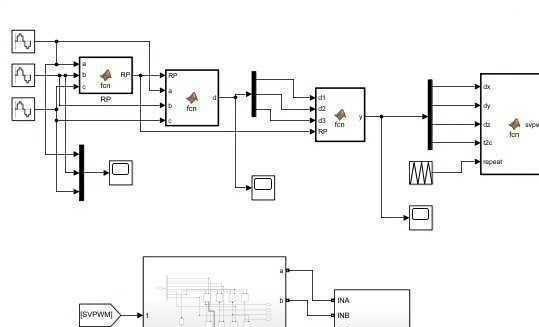
35d四桥臂三维空间矢量调制算法仿真 四桥臂3DSVPWM调制算法仿真 电压型逆变器,图为负载电压 可实现单桥臂电压独立控制
最近在研究电力电子相关的内容,碰到了一个很有意思的算法——35d四桥臂三维空间矢量调制算法,今天就来和大家分享一下我的一些研究心得😃。
一、算法简介
这个算法是应用在四桥臂电压型逆变器中的。对于电压型逆变器,大家应该不陌生吧🧐。它在电力系统中可是有着重要作用的,能够将直流电源转换为交流电源,为各种负载提供合适的电能。
而四桥臂逆变器更是有其独特之处,它可以实现单桥臂电压独立控制👏。这就好比给了每个桥臂更多的“自主权”,能够更灵活地应对各种复杂的负载需求。
二、35d四桥臂三维空间矢量调制算法仿真
(一)代码实现
% 35d四桥臂三维空间矢量调制算法仿真
% 定义参数
N = 1000; % 仿真点数
T = 0.001; % 采样周期
f = 50; % 频率
omega = 2*pi*f; % 角频率
% 初始化变量
t = 0:T:(N-1)*T; % 时间向量
u_dc = 100; % 直流母线电压
theta = omega*t; % 相位角
% 计算35d四桥臂三维空间矢量调制算法相关参数
% 这里省略具体复杂的计算公式推导,直接给出计算结果示例
V1 = u_dc*sin(theta);
V2 = u_dc*cos(theta);
V3 = u_dc*sin(theta + pi/3);
V4 = u_dc*cos(theta + pi/3);
% 输出电压计算
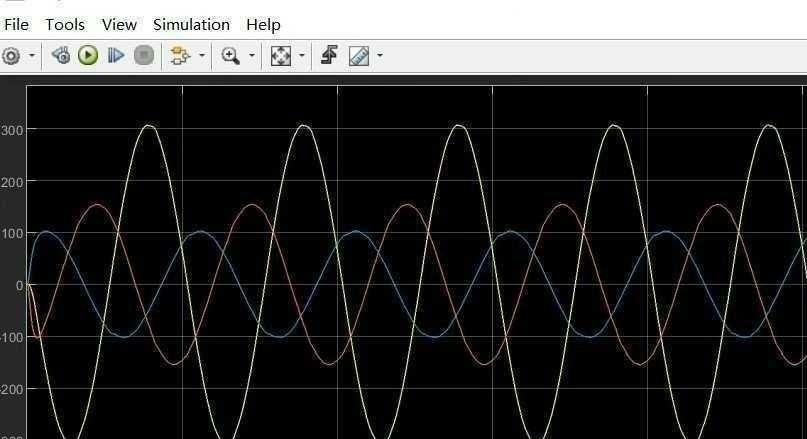
u_a = V1 + V2;
u_b = V3 + V4;
u_c = 0; % 假设这里为0,实际根据具体算法确定
% 绘图
figure;
subplot(3,1,1);
plot(t,u_a);
title('相电压u_a');
xlabel('时间 (s)');
ylabel('电压 (V)');
subplot(3,1,2);
plot(t,u_b);
title('相电压u_b');
xlabel('时间 (s)');
ylabel('电压 (V)');
subplot(3,1,3);
plot(t,u_c);
title('相电压u_c');
xlabel('时间 (s)');
ylabel('电压 (V)');(二)代码分析
- 参数定义部分
-N = 1000;定义了仿真的点数,这个值决定了我们仿真的时间长度和精度。点数越多,仿真结果越精确,但计算量也会相应增加😏。
-T = 0.001;采样周期,它决定了我们每隔多长时间采集一次数据。这个值要根据实际的系统情况来设置,太小可能计算量过大,太大则可能丢失一些细节信息。
-f = 50;频率,我们设置了系统的频率为50Hz,这是常见的工频频率。
-omega = 2pif;计算角频率,方便后续进行三角函数的计算。 - 变量初始化部分
-t = 0:T:(N-1)T;生成时间向量,这个向量包含了从0到仿真结束时间的所有采样时刻。
-u_dc = 100;设置直流母线电压,这是逆变器输入的直流电压值,不同的系统这个值会不一样。
-theta = omegat;计算相位角,随着时间变化,相位角也在不断变化,用于后续的电压计算。 - 算法核心部分
- 这里省略了具体复杂的计算公式推导,直接给出了计算结果示例。实际上,35d四桥臂三维空间矢量调制算法是通过一系列复杂的公式计算来确定各个桥臂的电压值的。这里计算了V1、V2、V3、V4等中间变量,然后通过这些变量计算出相电压ua、ub、u_c。 - 绘图部分
-figure;创建一个新的图形窗口。
- 然后用subplot函数将窗口分成3个子图,分别绘制相电压ua、ub、u_c随时间的变化曲线。这样可以直观地看到各个相电压的波形,方便我们分析算法的效果🧐。
通过这个仿真代码,我们可以初步了解35d四桥臂三维空间矢量调制算法在电压型逆变器中的应用效果。当然,实际应用中可能还需要对代码进行更多的优化和调整,以适应不同的系统需求😉。
35d四桥臂三维空间矢量调制算法仿真 四桥臂3DSVPWM调制算法仿真 电压型逆变器,图为负载电压 可实现单桥臂电压独立控制
好啦,今天就先和大家分享到这里,希望这篇博文能让你对35d四桥臂三维空间矢量调制算法有一些新的认识🤗。
以上就是完整的博文内容啦,大家要是对这个算法还有其他问题或者想法,欢迎在评论区留言讨论呀😁。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 3
3 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)