冲床错位送料设备程序,包含信捷PLC以及信捷HMI源程序,程序已包含注释 PLC型号XC3-3...
冲床错位送料设备程序,包含信捷PLC以及信捷HMI源程序,程序已包含注释 PLC型号XC3-32,人机型号:TG765 可用于各种送料设备开发参照套用,也可以作为工控爱好者的学习借鉴 程序主要功能:2个步进电机控制,机构夹持住工件,在X轴Y轴方向上按照设定步进长度送料,X Y单步移动的长度自由设定,同时根据设定的加工料件的长度和宽度自动计算X和Y轴移动的步数,非常方便 根据各位老板反馈,现作一下改进说明:1,注释已修改为中文 2,改程序运动轨迹修改为错位送料,如最后一张图示 3,本程序亮点在于自由设定功能,计算逻辑比较巧妙,看懂了希望/相信能获你会心一笑 不包含硬件
最近在折腾冲床送料设备的朋友应该都懂,要让XY轴带着料片玩出花样轨迹有多烧脑。今天拆解的这个信捷PLC+HMI组合方案,算是把错位送料的活整明白了。特别是那个自动计算步数的算法,调通那刻确实忍不住拍大腿——这思路有点东西!
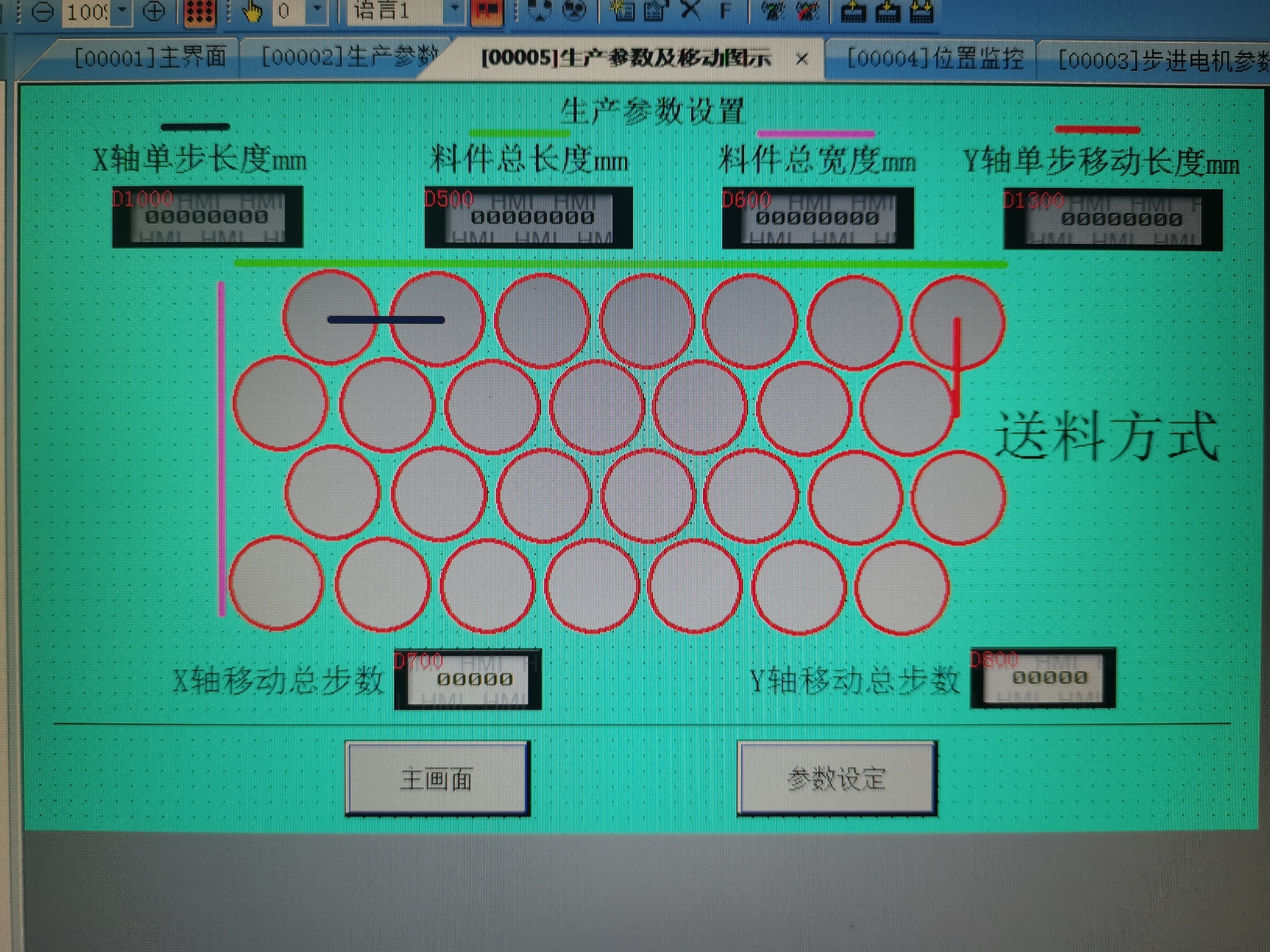
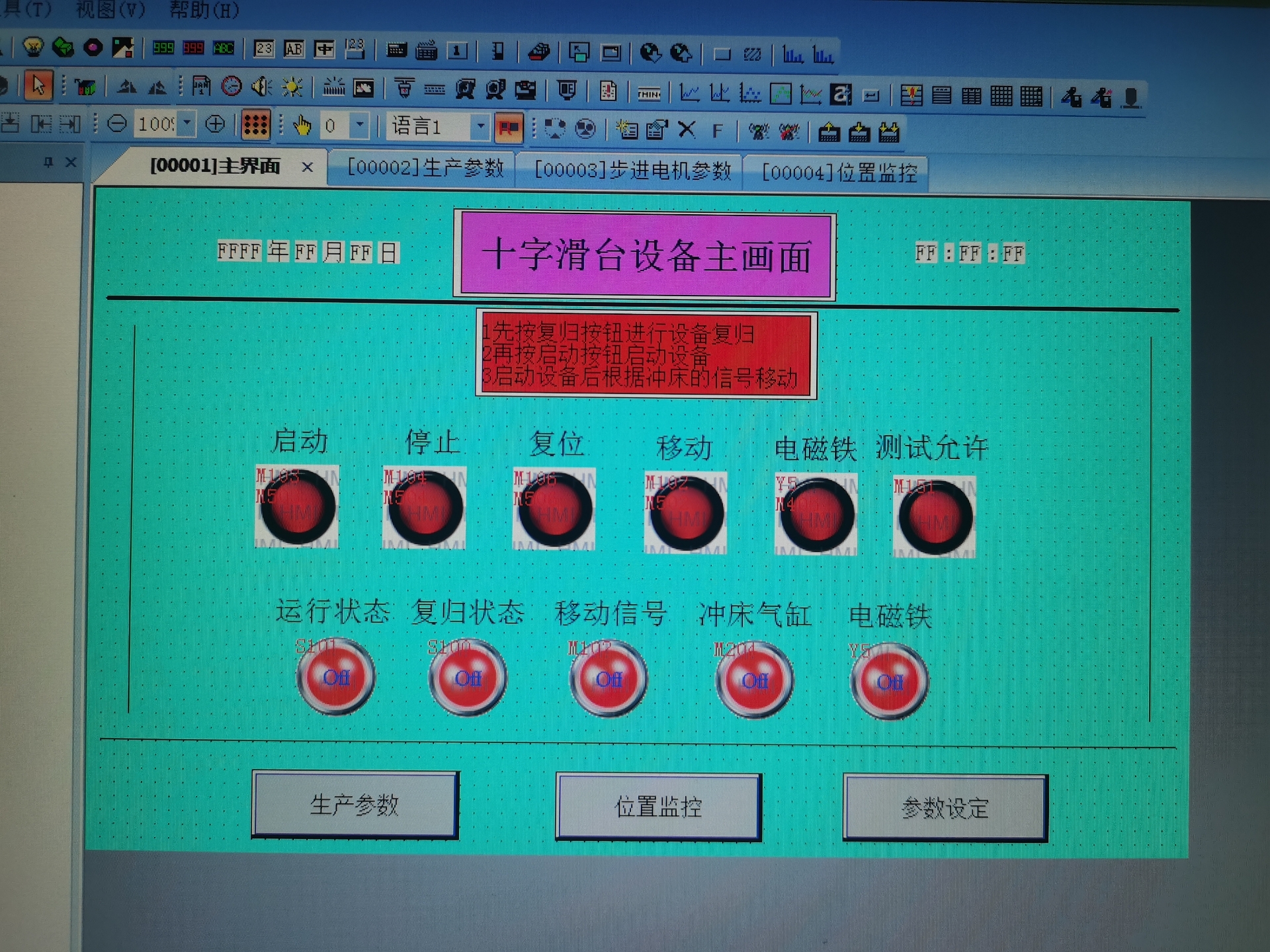
先看人机界面这波操作(TG765触摸屏):
![HMI界面示意图]
冲床错位送料设备程序,包含信捷PLC以及信捷HMI源程序,程序已包含注释 PLC型号XC3-32,人机型号:TG765 可用于各种送料设备开发参照套用,也可以作为工控爱好者的学习借鉴 程序主要功能:2个步进电机控制,机构夹持住工件,在X轴Y轴方向上按照设定步进长度送料,X Y单步移动的长度自由设定,同时根据设定的加工料件的长度和宽度自动计算X和Y轴移动的步数,非常方便 根据各位老板反馈,现作一下改进说明:1,注释已修改为中文 2,改程序运动轨迹修改为错位送料,如最后一张图示 3,本程序亮点在于自由设定功能,计算逻辑比较巧妙,看懂了希望/相信能获你会心一笑 不包含硬件
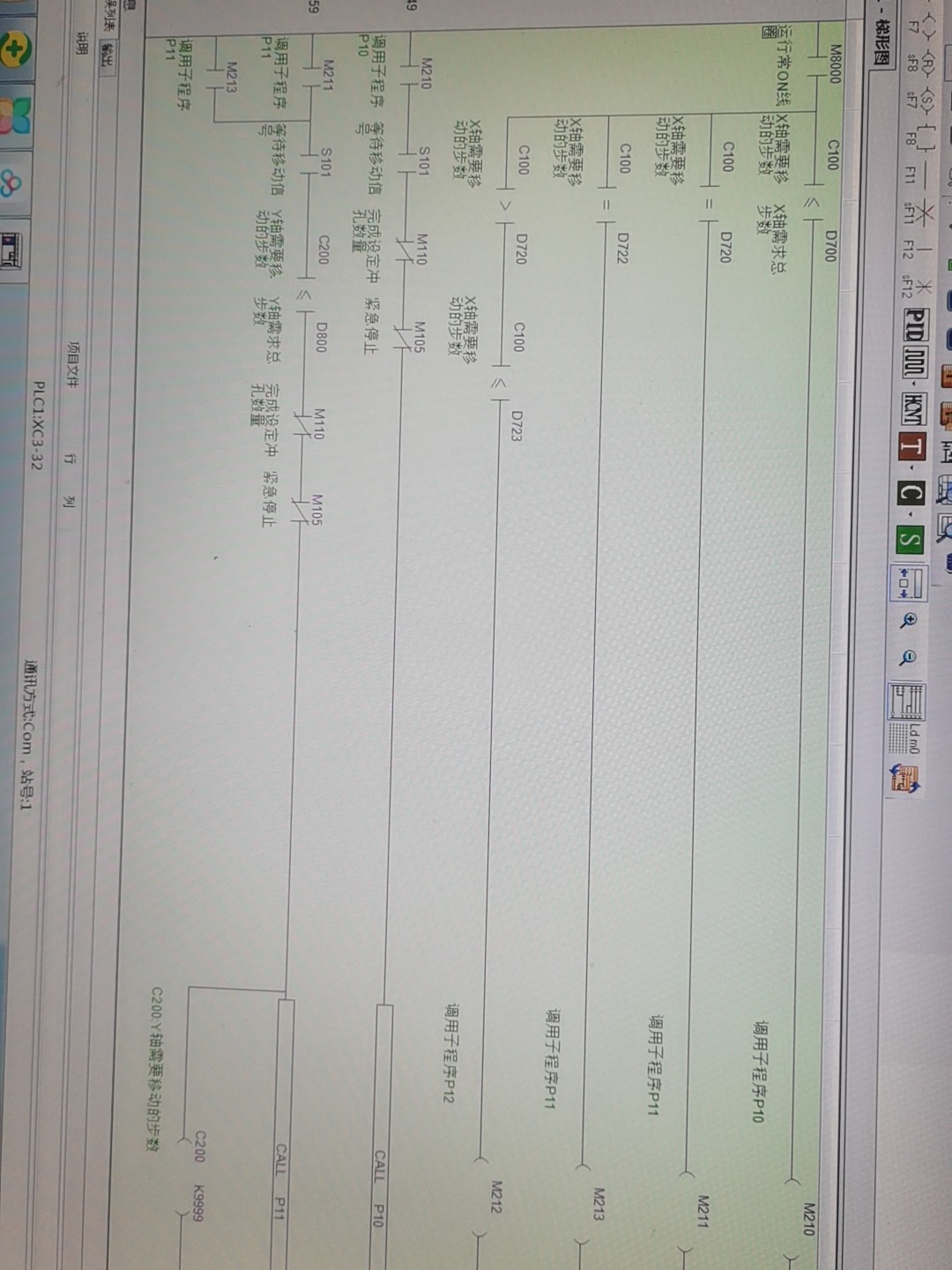
随便输个长宽尺寸,比如料片设成200x150mm,XY步进量填个10mm。重点来了,程序会自动把总行程拆成N个步进电机的脉冲数。这个转换逻辑藏在PLC的算法模块里,咱们看段核心代码:
// 计算X轴所需脉冲数
X_Pulse_Count := (Workpiece_Length / Step_Length_X) * 1000;
// 计算Y轴偏移系数
Y_Offset_Factor := (Current_Index MOD 2) * 0.5;
// 错位运动轨迹计算
IF Y_Offset_Factor <> 0 THEN
Y_Pulse_Count := (Workpiece_Width / Step_Length_Y) * 1000 + Offset_Compensation;
END_IF这段代码的妙处在于用取余运算实现错位。当运行到奇数步时,Y轴自动叠加半个步长的偏移量,就像瓦工砌墙的错缝原理。那个MOD取模运算符用得贼溜,比用计数器判断奇偶更省资源。
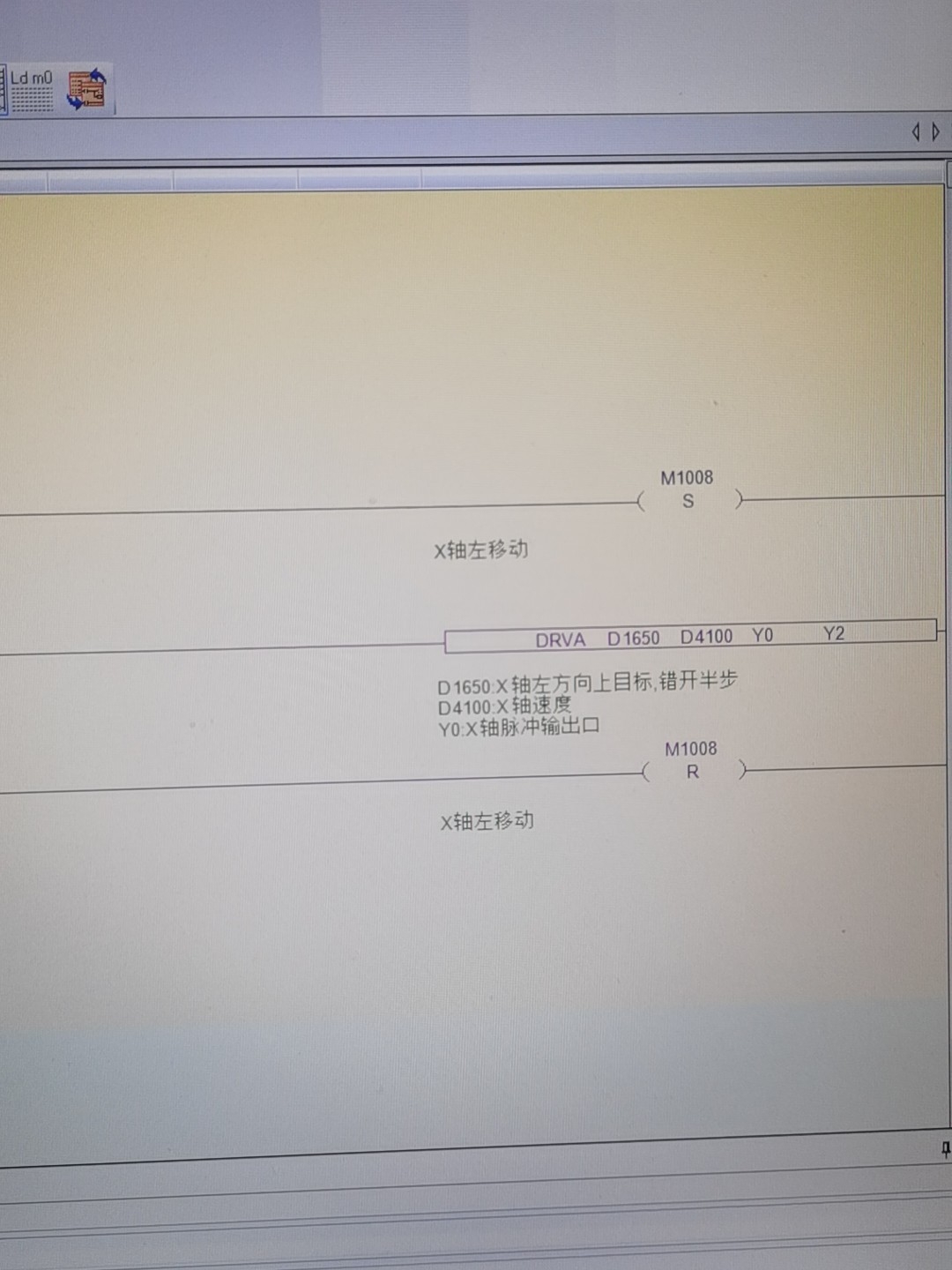
运动控制部分采用相对定位指令:
DRVI X_Pulse_Count, 5000, Y_Pulse_Count, 3000; // 双轴联动注意脉冲频率参数别设太高,特别是国产步进电机,实测超过10KHz容易丢步。程序里埋了个速度缓升曲线,在加速段用了指数函数做过渡,这个细节处理比直接梯形加速稳得多。
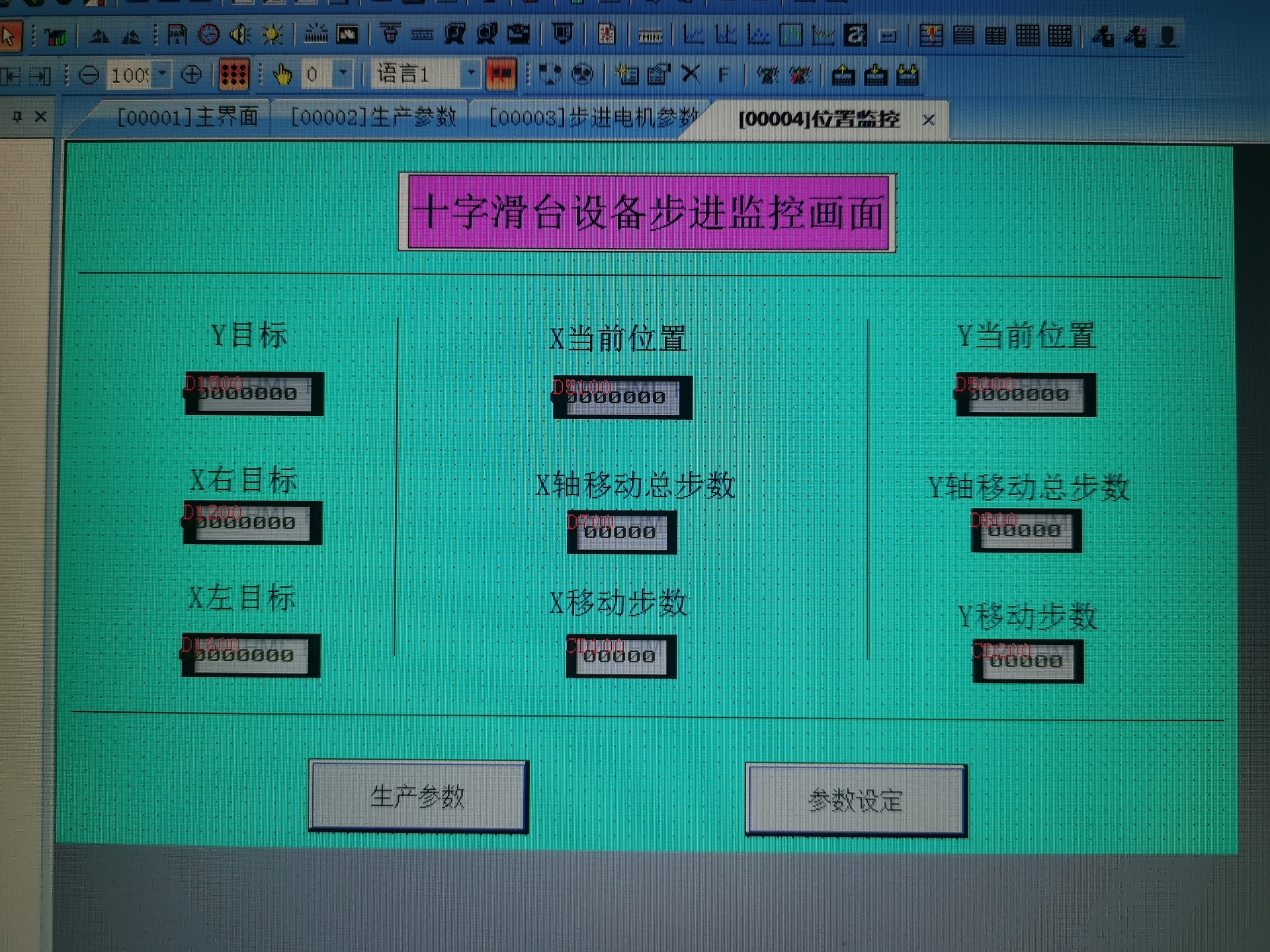
说到参数设定自由度,HMI后台其实藏了个工程师菜单(同时长按左下角三个区域可调出)。这里能微调的东西就刺激了——包括:
- 回原点时的防撞缓冲距离
- 紧急停止时的减速斜率
- 脉冲当量校准系数
这套程序最让我服气的是异常处理机制。比如当设定步长大于料片尺寸时,会触发HMI的警告动画,同时PLC自动锁定启动信号。看这个互锁逻辑:
IF (Step_Length_X >= Workpiece_Length) OR (Step_Length_Y >= Workpiece_Width) THEN
Safety_Lock := TRUE;
HMI_Warning := 1;
END_IF想移植到其他设备的兄弟注意了,脉冲当量换算部分需要根据实际机械结构修改。程序里用了个比例常数,建议先拿公式算一遍:
实际移动量 = (脉冲数 * 丝杠导程) / (减速比 * 编码器分辨率)最后说下那个蛇形走位的轨迹优化。传统方案要写两套运动程序来回切换,这里直接用Y轴坐标乘以相位系数搞定。就像小时候画分形图那种感觉,参数改个系数就能出不同花纹,属实把运动控制玩成像素画了。
源码包里的中文注释确实贴心,连气缸夹持的延时都标着"别小于0.3秒,会夹不紧!"。建议重点研究运动计算函数块FC2,里面那个动态分配脉冲的算法,比教科书上的案例实在多了。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 17
17 0
0- 0



 已为社区贡献14条内容
已为社区贡献14条内容

所有评论(0)