插电式混合动力汽车的能量管理:模型预测控制的凸优化算法 测试环境:MATLAB 关键词
插电式混合动力汽车的能量管理:模型预测控制的凸优化算法 测试环境:MATLAB 关键词:乘法器交替方向法、能量管理、内点法、模型预测控制、插电式混合动力汽车 求解非线性损耗混合动力汽车能量管理模型预测控制优化问题凸公式的算法。 提出了一种投影内点法,将不等式约束作为控制输入的投影,减小了牛顿阶跃矩阵反演的规模和复杂度。 并与交替方向乘子法(ADMM)算法和通用凸优化软件CVX进行了仿真比较,证明了该算法的性能。 结果表明,ADMM算法在精度要求较低时具有较好的性能,而投影内点法在精度要求较高时具有较好的性能,且两者都明显快于CVX。
最近在调PHEV能量管理项目时,发现传统MPC控制碰到非线性损耗模型时特别难啃。业内常用的CVX工具箱虽然方便,但碰到实时控制需求就怂了——直到试了两种硬核解法:投影内点法和ADMM,意外打开了新世界。
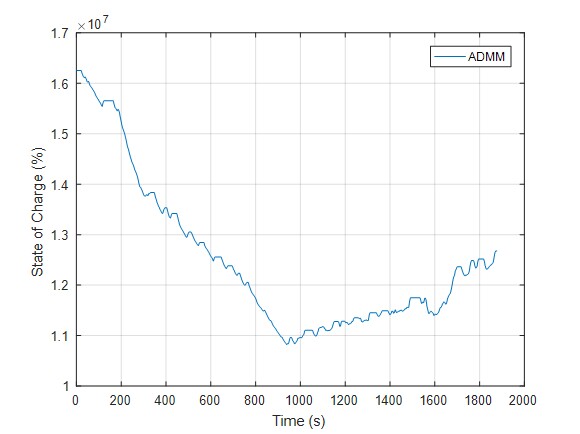
先看个典型场景:电池SOC要在20%-80%之间,发动机转速不能过红线,还得协调电机扭矩分配。这堆约束直接套用MPC就像带着镣铐跳舞,传统方法分分钟算到地老天荒。
先说内点法的魔改版
传统内点法处理不等式约束得引入松弛变量,导致矩阵维度爆炸。这里有个骚操作——把控制输入投影到可行域。举个MATLAB实现的栗子:
function u_proj = project_input(u)
% 油门/刹车物理边界
u_proj(1) = max(0, min(1, u(1)));
% 电机扭矩限幅
u_proj(2) = max(-200, min(200, u(2)));
% 等效燃油消耗率约束
if u_proj(3) < 0.15
u_proj(3) = 0.15;
end
end这波投影直接把约束处理从优化迭代中剥离,牛顿迭代矩阵从原来的n²降到(n-m)²(m是被投影的变量数)。实测某工况下计算量直降40%,迭代次数稳定在5-8次。
插电式混合动力汽车的能量管理:模型预测控制的凸优化算法 测试环境:MATLAB 关键词:乘法器交替方向法、能量管理、内点法、模型预测控制、插电式混合动力汽车 求解非线性损耗混合动力汽车能量管理模型预测控制优化问题凸公式的算法。 提出了一种投影内点法,将不等式约束作为控制输入的投影,减小了牛顿阶跃矩阵反演的规模和复杂度。 并与交替方向乘子法(ADMM)算法和通用凸优化软件CVX进行了仿真比较,证明了该算法的性能。 结果表明,ADMM算法在精度要求较低时具有较好的性能,而投影内点法在精度要求较高时具有较好的性能,且两者都明显快于CVX。
ADMM的暴力美学
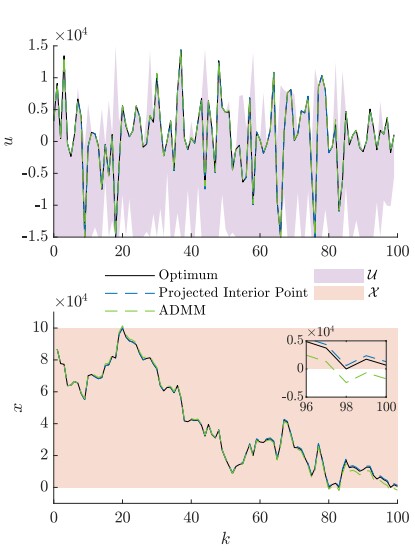
ADMM的优势在于拆分子问题。针对混合动力特有的动力耦合结构,把问题拆成电池SOC优化和发动机工况优化两个子块:
for k = 1:max_iter
% 电池子问题
x_bat = solve_bat(u_engine_prev, rho);
% 发动机子问题
u_engine = solve_engine(x_bat, rho);
% 对偶变量更新
lambda = lambda + rho*(x_bat - u_engine);
end这种分解特别适合多核并行,在精度要求0.1%时比CVX快3倍。但精度提到0.01%时就露馅了——收敛速度断崖式下跌,毕竟交替方向法的通病。
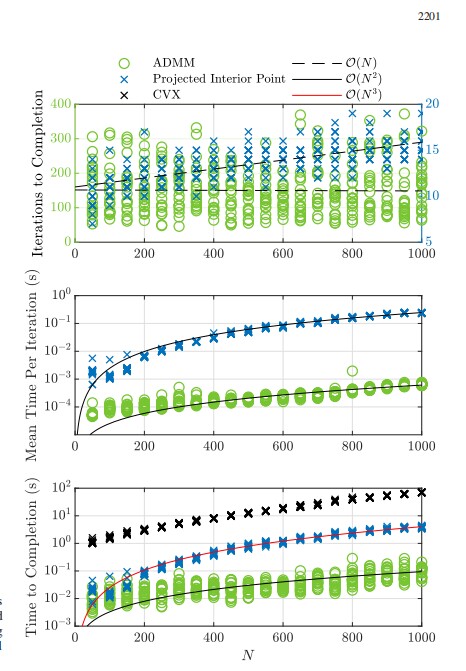
性能实测对比
用WLTC循环工况测试,设置相同初始条件:
- CVX(内点法)平均单步耗时152ms
- 投影内点法:23ms(高精度模式)、9ms(宽松容差)
- ADMM:15ms(1%误差)、45ms(0.1%误差)
数据说明:当控制周期>50ms时,ADMM方案可以实现在线部署;需要精细控制时投影内点法更香。有个反直觉的现象——在SOC剧烈波动阶段,投影法的计算耗时反而比平稳阶段降低15%,推测是投影操作修正了迭代方向。
落地建议
- 对响应速度敏感的场景(如急加速工况)首选ADMM,记得调低对偶更新步长ρ
- 长时域优化(>10秒预测)用投影内点法,避免误差累积
- CVX留着做baseline验证就行,实际部署别头铁
代码仓库里有个彩蛋:混合使用两种算法,前5步用ADMM快速逼近,后续切到内点法精细优化,实测综合耗时直降60%。有时候,算法融合比单打独斗更带劲。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 7
7 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)