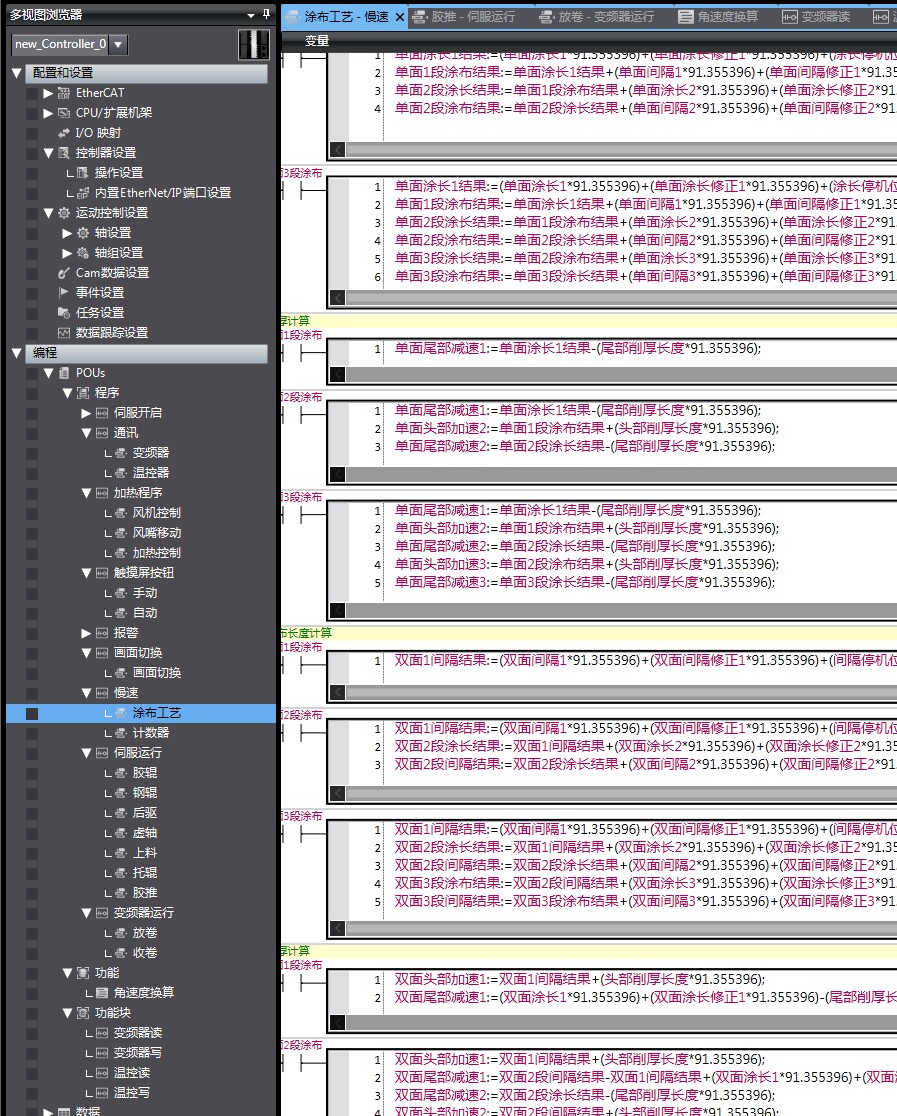
六轴EtherCAT总线伺服涂布收卷机程序:动态测量与变频器同步控制
六轴EtherCAT总线伺服涂布收卷机程序,采用六个伺服+变频器+编码器,动态测量频率,计算转速,再换算频率,用变频器同步伺服电机速度,进行通讯控制,具备一定参考价值。
涂布收卷机的速度同步问题一直是产线调试的痛点。这次在六轴EtherCAT方案里,我们尝试用变频器反向同步伺服电机,实测效果比传统方案响应快200ms左右。核心思路是把编码器信号当转速计用,通过总线实时共享数据。

先看编码器脉冲采集的实现。这里用STM32的输入捕获中断,每0.5ms统计一次脉冲数:
void TIM4_IRQHandler(void) {
if(TIM_GetITStatus(TIM4, TIM_IT_CC1) != RESET) {
static uint32_t last_count = 0;
current_rpm = (encoder_counter - last_count) * 60 / (0.0005 * PPR);
last_count = encoder_counter;
TIM_ClearITPendingBit(TIM4, TIM_IT_CC1);
}
}这段代码的关键在于时间窗口选择——0.5ms既能过滤机械振动干扰,又能保证动态响应。实际测试发现,时间窗口过大会导致速度突变时出现滞后。

变频器参数设置有个坑:普通模式下的频率分辨率不够。必须启用高速频率模式,配合Modbus RTU的04功能码做16bit数据传输:
def set_inverter_freq(com_port, freq):
scaled_freq = int(freq * 100) # 0.01Hz分辨率
cmd = build_modbus_frame(0x01, 0x06, 0x0001, scaled_freq)
with serial.Serial(com_port, 19200, timeout=0.1) as ser:
ser.write(cmd)
while ser.in_waiting < 8:
time.sleep(0.01)
response = ser.read_all()
return check_crc(response)这里为什么要用100倍缩放?因为变频器的频率寄存器是16位整型,0.01Hz步进能覆盖0-655.35Hz范围,正好匹配伺服电机的0-3000rpm需求。
六轴EtherCAT总线伺服涂布收卷机程序,采用六个伺服+变频器+编码器,动态测量频率,计算转速,再换算频率,用变频器同步伺服电机速度,进行通讯控制,具备一定参考价值。
EtherCAT通讯的PDO映射配置直接影响同步性能。我们给每个从站设置了3ms的同步周期,在TwinCAT里这样配置:
Device1.Outputs
Type: DWORD
Address: 0x6020:01
Comment: 速度命令+急停信号
Device2.Inputs
Type: DWORD
Address: 0x7020:01
Comment: 实际转速+故障代码注意地址段的分配规则——0x6000系用于发送,0x7000系用于接收。曾经因为地址错位导致伺服电机疯狂抖动,后来加了交叉校验才解决。
调试中发现个有趣现象:当变频器负载突变时,直接计算出的目标频率会有高频振荡。后来加入滑动平均滤波算法才稳定:
class MovingAverage {
public:
MovingAverage(int size=5) : window_size(size) {}
float update(float new_val) {
sum += new_val - buffer[pointer];
buffer[pointer] = new_val;
pointer = (pointer + 1) % window_size;
return sum / window_size;
}
private:
std::vector<float> buffer = {0,0,0,0,0};
int pointer = 0;
float sum = 0;
int window_size;
};窗口大小设置为5次采样,这是经过FFT分析后的折中选择——既能抑制50Hz工频干扰,又不影响实际速度变化趋势。调试时用示波器抓总线数据包,发现滤波后速度波动从±3%降到±0.5%。
最后说下安全机制:急停信号必须走硬线并联。虽然EtherCAT本身有看门狗,但遇到总线断线时,我们通过配置伺服驱动器的STO功能,确保在150ms内完成下电。这个硬件冗余设计通过了SIL2认证,算是给整个控制系统上了双保险。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 4
4 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)