RT-Thread在STM32F103VCT5上的移植与应用实例
RT-Thread是一个开源、可裁剪、实时性好的物联网操作系统。它以模块化、组件化、可配置化的架构设计,满足不同场景下的应用需求。RT-Thread具有良好的稳定性、易用性和高效性,已被广泛应用于工业控制、车载电子、智能穿戴等多个领域。STM32F103VCT5是STMicroelectronics(意法半导体)推出的基于ARM Cortex-M3核心的高性能微控制器。它具有丰富的外设资源,包括多

简介:RT-Thread操作系统以其开源、实时、轻量级的特点,非常适合嵌入式设备应用。本实例将详细说明如何将RT-Thread移植到基于ARM Cortex-M3内核的STM32F103VCT5微控制器上,以增强系统的实时性、可靠性和可扩展性。文章涵盖了从开发环境准备、源码下载与定制、启动代码编写、硬件驱动开发,到软件包的集成与调试工具使用等多个关键步骤。最终通过针对特定开发板的移植指南或代码示例,帮助开发者在STM32F103VCT5上实现和优化RT-Thread操作系统。 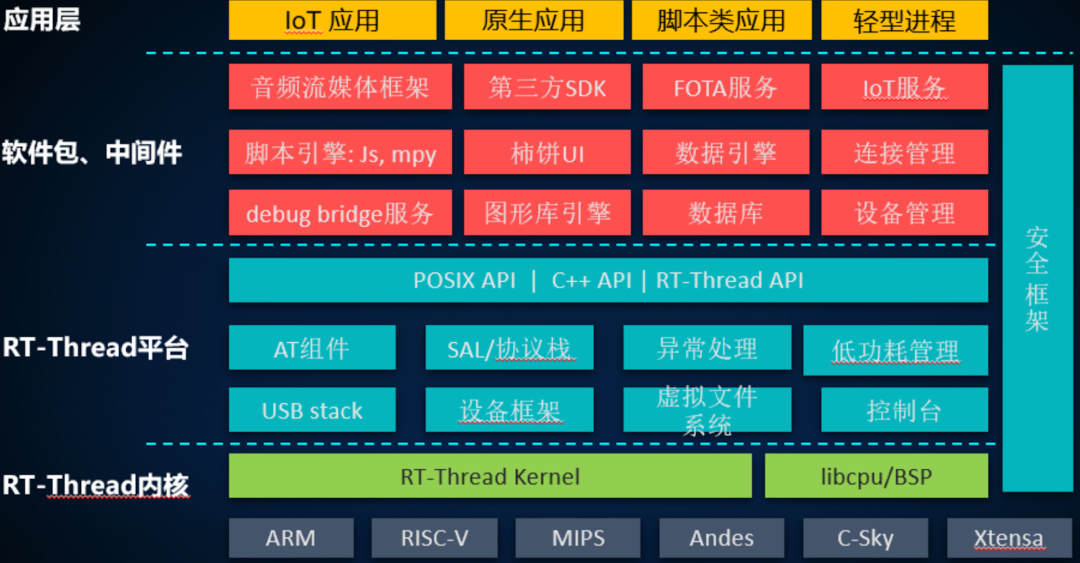
1. RT-Thread操作系统核心特性介绍
1.1 RT-Thread的简介
RT-Thread是一个开源、可裁剪、实时性好的物联网操作系统。它以模块化、组件化、可配置化的架构设计,满足不同场景下的应用需求。RT-Thread具有良好的稳定性、易用性和高效性,已被广泛应用于工业控制、车载电子、智能穿戴等多个领域。
1.2 RT-Thread的核心特性
RT-Thread的核心特性包括实时性、模块化设计、丰富的组件库和设备驱动、强大的网络功能以及友好的开发环境。
- 实时性 :RT-Thread具有优先级调度、时间片调度等多种调度策略,满足各种实时应用需求。
- 模块化设计 :RT-Thread的模块化设计使得开发者可以根据需要裁剪或添加功能模块,使系统更加灵活。
- 丰富的组件库和设备驱动 :RT-Thread拥有丰富的组件库和设备驱动,涵盖了文件系统、网络协议栈、图形界面、音频处理等多个方面。
- 强大的网络功能 :RT-Thread支持多种网络协议,如TCP/IP、HTTP、MQTT等,为物联网应用提供了强大的支持。
- 友好的开发环境 :RT-Thread提供了一站式的开发工具,包括源码管理、构建、调试等,大大降低了开发难度。
以上是对RT-Thread操作系统核心特性的简单介绍,后续章节将详细介绍如何在STM32F103VCT5微控制器上应用RT-Thread操作系统。
2. STM32F103VCT5微控制器应用背景
2.1 STM32F103VCT5概述
2.1.1 微控制器特点与架构
STM32F103VCT5是STMicroelectronics(意法半导体)推出的基于ARM Cortex-M3核心的高性能微控制器。它具有丰富的外设资源,包括多达112个I/O口、多个串行通信接口、支持多种模拟和数字接口,以及丰富的定时器功能。这一切使得STM32F103VCT5成为了一个强大的多功能平台,适合用于复杂和多样化的嵌入式应用,从简单的传感器接口到复杂的通信网关系统。
微控制器的架构采用经典的哈佛架构,具有分层的存储系统,可以实现高效率的数据处理。其内置的Flash存储器和RAM为程序和数据提供了足够的存储空间,而电源管理模块则确保了在不同性能需求下能有效调节功耗。
2.1.2 STM32F103VCT5与RT-Thread的契合度分析
RT-Thread是一个开源的实时操作系统(RTOS),它以模块化、组件化、可配置的结构特点著称,非常适合用于资源受限的嵌入式设备。STM32F103VCT5由于其硬件资源的丰富性和性能上的优势,能够很好地运行RT-Thread这样的RTOS,从而提供实时性和多任务处理的能力。
RT-Thread与STM32F103VCT5的契合度非常高,一方面,RT-Thread的源代码对硬件的抽象使得其易于移植到不同的硬件平台上;另一方面,STM32F103VCT5提供了足够的硬件支持,包括中断处理、定时器、通信接口等,为RT-Thread的运行提供了良好的物理基础。
2.2 STM32F103VCT5开发环境搭建
2.2.1 必要的开发工具和软件
开发STM32F103VCT5的环境,通常需要以下几个关键工具和软件:
- 编译器 :GCC(GNU Compiler Collection)是首选,特别是针对ARM Cortex-M系列的arm-none-eabi-gcc。这个编译器能够生成适用于STM32F103VCT5的机器代码。
- 集成开发环境(IDE) :Keil uVision、IAR Embedded Workbench以及Eclipse配合GNU ARM Eclipse插件都是不错的选择。Keil uVision特别流行,因为它对ARM Cortex-M系列的支持非常好。
- 调试器/编程器 :ST-Link是ST公司官方提供的调试和编程工具,支持JTAG和SWD接口,能够与STM32F103VCT5无缝配合。
2.2.2 开发板的硬件需求与软件配置
开发板需要具备以下硬件条件:
- STM32F103VCT5微控制器
- ST-Link调试器
- 电源接口(USB或外接电源)
- 必要的接口和扩展模块(如USB转串口、JTAG/SWD接口等)
软件配置方面,需要进行以下步骤:
- 安装编译器和IDE。
- 使用IDE创建项目,并进行编译器配置,确保编译器路径和链接器设置正确。
- 通过IDE的项目设置,配置微控制器的时钟系统和其他必要的外设参数。
- 加载调试器驱动,并确保可以连接到ST-Link。
- 配置项目构建步骤,包括编译、链接以及调试信息生成等。
- 在必要时,根据实际的硬件连接情况,对调试器和开发板进行设置,以确保代码能够在目标硬件上正确运行。
通过上述步骤,开发者能够设置好开发环境,为接下来的代码编译和调试打下基础。
3. 开发环境配置与RT-Thread源码定制
3.1 开发环境配置
3.1.1 系统环境的搭建
在进行RT-Thread操作系统开发之前,开发者首先需要搭建一个稳定且适宜的系统环境。对于不同的操作系统,比如Windows、Linux和macOS,搭建环境的步骤会有所不同。
以Windows为例,为了简化开发流程,推荐使用集成开发环境(IDE)如Keil uVision、IAR Embedded Workbench或者国产的RT-Thread Studio。安装IDE之后,用户需要安装相应的编译器,例如ARM公司的GCC编译器,它能够为STM32F103VCT5微控制器提供支持。
在Linux环境下,可以使用命令行工具安装交叉编译工具链。对于RT-Thread,通常会使用 arm-none-eabi-gcc 工具链。可以通过包管理器安装或者从源代码编译安装。对于macOS,可以通过Homebrew或者MacPorts来安装所需的工具链。
3.1.2 开发工具链的选择与安装
选择合适的工具链是开发过程中重要的一环。工具链不仅包括编译器,还包括链接器、调试器等。开发者在选择工具链时,需要考虑是否支持目标处理器架构、是否具备良好的社区支持以及是否适合当前的开发需求。
以 arm-none-eabi-gcc 为例,该工具链专为嵌入式ARM处理器设计,它不包括任何针对特定操作系统调用的库,是纯裸机开发的理想选择。开发者可以通过下面的命令来安装该工具链:
# 对于Ubuntu系统,使用下面的命令来安装
sudo apt-get install gcc-arm-none-eabi
安装后,需要确保工具链的路径被添加到系统的环境变量中,这样在终端中就可以直接使用 arm-none-eabi-gcc 命令了。对于Windows系统,通常会提供相应的安装程序,按照提示安装即可。
3.2 RT-Thread源码下载与定制
3.2.1 获取RT-Thread官方源码
RT-Thread官方源码可通过官方Git仓库下载。可以使用Git命令行工具或者GitHub的图形界面客户端来克隆仓库。
在命令行中,执行以下命令即可下载RT-Thread的官方源码:
git clone https://github.com/RT-Thread/rt-thread.git
执行完毕后,开发者将拥有RT-Thread的完整代码副本。为了能够及时获取官方的更新和修复,建议开发者保持对官方仓库的跟踪。
3.2.2 源码定制与配置
RT-Thread的源码具有很好的模块化设计,这为开发者提供了定制化的便利。开发者可以根据需要启用或禁用某些组件,也可以添加自己开发的模块。源码定制主要通过修改 rtconfig.py 文件和 scons 脚本来完成。
rtconfig.py 文件负责设置系统的基本配置选项,如编译器选项、CPU架构、内存布局等。例如,启用文件系统功能,需要在 rtconfig.py 中将 RT_USING_FAL 设置为 1 :
menuconfig RT_USING_FAL
bool "Enable fal (Flash Abstraction Layer)"
default n
scons 是一个快速的构建系统,用于构建RT-Thread项目。通过修改 scons 脚本,开发者可以添加特定的编译选项,也可以针对特定的开发板编写编译脚本。例如,要为STM32F103VCT5定制源码,需要在 sconscript 文件中指定对应的开发板配置文件:
# sconscript for STM32F103VCT5 board
env = Environment()
board = 'stm32f10x_std'
source = env.SConscript(['boards/' + board + '/sconscript'], exports = env拷贝)
通过上述步骤,开发者便可以根据项目需求对RT-Thread源码进行定制,以适应不同的硬件平台和软件需求。
4. RT-Thread代码编译与硬件软件适配
4.1 编译方式选择与配置
4.1.1 编译工具介绍
在嵌入式系统开发中,编译器的作用至关重要,因为它将高级语言编写的源代码转换成微控制器可以直接执行的机器代码。RT-Thread操作系统支持多种编译方式,常见的有GCC、Keil、IAR等。对于习惯于开源软件的开发者,GCC是一个极佳的选择,因为它完全免费,且支持广泛的硬件平台。GCC编译器是GNU工具链的一部分,被广泛应用于Linux和类Unix操作系统。
RT-Thread通常采用ARM-none-eabi-gcc作为其交叉编译工具链。这里的"交叉"指的是编译器生成的代码不是用于编译它的同一架构的CPU上运行,而是用于目标嵌入式设备上。而 none-eabi 是指该工具链不包含任何针对特定操作系统的调用接口,这是因为嵌入式设备没有操作系统或者有一个简化版的操作系统。
4.1.2 不同编译方式的配置方法
不同的编译方式,其配置方法也有所不同。以GCC编译方式为例,配置通常涉及以下几个步骤:
- 安装编译工具链 :可以从ARM官网下载预编译的工具链,或者使用包管理器如apt-get或者yum来安装。例如,在Ubuntu系统中可以使用以下命令安装:
sh sudo apt-get install gcc-arm-none-eabi - 环境变量设置 :安装后需要将编译器的路径添加到系统的环境变量中,以便能够在任何目录下使用编译器。在
.bashrc或.bash_profile文件中添加如下行:sh export PATH=$PATH:/path/to/gcc-arm-none-eabi/bin - 配置项目编译选项 :在项目根目录下创建一个Makefile文件,其中定义编译选项、源文件路径和库路径等。例如:
makefile # 可以根据实际情况进行调整 include $(RTT_PATH)/include.mk C_SOURCES = src/main.c src/hal_entry.c CFLAGS = -mcpu=cortex-m3 -mthumb -I./include -I$(RTT_PATH)/include LDFLAGS = -Tlinker_script.ld -nostartfiles OBJS = $(C_SOURCES:.c=.o) - 编译项目 :通过运行
make命令,根据Makefile中定义的规则进行编译,生成最终的二进制文件。
4.2 启动代码编写与适配
4.2.1 启动代码的作用与结构
启动代码(也称为启动汇编或启动程序)是程序执行的第一段代码,它是微控制器在上电复位后首先执行的一段代码。启动代码的主要作用是初始化系统硬件环境,如设置堆栈指针、配置时钟系统、初始化数据段、以及设置中断向量表等。当所有硬件环境初始化完毕后,启动代码将跳转到主函数 main() 开始执行应用程序。
启动代码通常由汇编语言编写,因为汇编语言能够提供精确控制处理器和寄存器的能力。以下是一个简单的启动代码示例结构:
.section .vectors, "a"
.align 2
.type g_pfnVectors, %object
.size g_pfnVectors, .-g_pfnVectors
g_pfnVectors:
.word _estack
.word Reset_Handler
.section .text.Reset_Handler
.type Reset_Handler, %function
Reset_Handler:
// 初始化堆栈指针
LDR SP, =_estack
// 跳转到主函数main()
bl main
// 死循环,防止程序执行到未知区域
Hang:
B Hang
4.2.2 启动代码的编写步骤与调试
启动代码的编写需要遵循微控制器的硬件手册和启动序列的具体要求。以下是编写和调试启动代码的一般步骤:
- 创建汇编源文件 :通常,启动代码会被保存在独立的汇编文件中,如
startup.s。 - 设置堆栈指针 :设置初始堆栈指针
_estack,它指向RAM的最高地址。 - 初始化向量表 :根据处理器的规格书,将中断向量表填充到指定的位置,并确保Reset_Handler是第一个向量。
- 编写中断服务例程 :为可能的中断事件编写相应的中断服务例程(ISR)。
- 编写初始化代码 :编写初始化外设、配置时钟系统等的代码,这些代码将放在Reset_Handler中。
- 编译启动代码 :通过汇编器将启动代码编译成机器码。
- 链接 :将编译好的启动代码链接到最终的二进制文件中。
- 调试 :在硬件上运行程序,并通过调试器检查堆栈指针、时钟配置、外设初始化等是否按预期工作。
4.3 硬件驱动编写与适配
4.3.1 硬件驱动的结构和工作原理
硬件驱动是操作系统和硬件之间通信的桥梁。它们通常以模块化的方式存在,允许操作系统调用一组标准化的API来控制硬件。硬件驱动的结构一般包含以下几个部分:
- 初始化与清理 :在系统启动时初始化硬件设备,以及在系统关闭或设备不再使用时释放资源。
- 数据传输 :负责数据在主机和硬件设备之间的传输,包括写入和读取数据。
- 设备控制 :允许操作系统发送控制命令给硬件,例如启动或停止传输。
- 中断处理 :处理来自硬件设备的中断请求,并执行必要的中断服务例程。
硬件驱动的工作原理是遵循特定于硬件的编程接口,通过寄存器配置、内存映射或特定的命令序列与硬件设备进行交互。例如,对于串行通信端口的驱动,其工作原理包括配置波特率、数据位、停止位、奇偶校验等参数,然后使用这些配置发送和接收数据。
4.3.2 硬件驱动的编写流程和适配案例
编写硬件驱动的流程可按以下步骤进行:
- 阅读硬件手册 :详细了解目标硬件的技术规格,包括寄存器映射、操作模式、配置选项等。
- 编写驱动代码 :根据硬件手册,使用C语言或汇编语言编写驱动代码。驱动代码应当具有良好的可读性和可维护性。
- 适配操作系统的框架 :如果操作系统的内核提供设备驱动框架,则需要按照框架的要求来实现驱动的接口函数。
- 测试和调试 :在目标硬件上运行驱动代码,并通过调试工具进行测试。检查硬件设备是否按预期工作,以及是否能够正确处理错误情况。
以STM32F103VCT5的GPIO(通用输入输出)驱动编写为例,以下是一个简单的驱动函数示例,用于配置GPIO为输出模式:
#include "stm32f10x.h"
void GPIO_Configuration(void) {
GPIO_InitTypeDef GPIO_InitStructure;
// 启用GPIO端口时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
// 设置GPIO模式为推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
在实际应用中,你可能还需要编写函数来控制GPIO的状态(例如,设置为高电平或低电平)。
4.4 代码编译适配和启动代码适配案例
在编译RT-Thread操作系统时,需要根据所选的编译方式和硬件平台进行相应的适配。以下是一个基于STM32的RT-Thread代码编译和启动代码适配的案例:
首先,配置编译工具链:
export RTT_EXEC_PATH=/path/to/rtthread/bsp/stm32
export PATH=$PATH:/path/to/gcc-arm-none-eabi/bin
然后,在RT-Thread的根目录下创建Makefile文件,确保编译脚本能够正确找到所需的库文件和头文件。
接下来,编写启动代码 startup.s :
.section .isr_vector,"a",%progbits
.type g_pfnVectors, %object
.size g_pfnVectors, .-g_pfnVectors
g_pfnVectors:
.word _estack
.word Reset_Handler
.section .text.Reset_Handler
.type Reset_Handler, %function
Reset_Handler:
// 初始化堆栈指针
LDR SP, =_estack
// 调用RT-Thread初始化函数rtthread_system_init
bl rtthread_system_init
// 跳转到主函数main()
bl main
// 死循环
Hang:
B Hang
确保在链接脚本文件中设置好向量表和堆栈指针的初始值。
最后,编译项目:
make RTT_CC=gcc
这个案例将展示如何为基于STM32的板子编译RT-Thread操作系统,使用的是GCC交叉编译工具链,并在编译过程中进行了适配。
flowchart LR
A[开始编译] --> B[加载Makefile]
B --> C[初始化编译环境]
C --> D[编译源文件]
D --> E[链接对象文件和库]
E --> F[生成二进制文件]
F --> G[结束编译]
以上步骤是编写一个完整嵌入式软件系统中的关键环节。适当地配置和编写启动代码、硬件驱动,以及选择合适的编译工具和方式,都是确保系统稳定运行的基础。在本章节中,我们已经对如何进行这些操作有了基本的了解,并通过案例分析加深了理解。
5. 软件包集成、调试工具使用与性能优化
5.1 软件包的集成与安装
5.1.1 软件包的作用和分类
软件包在嵌入式操作系统中扮演着重要角色,它是用于提供特定功能的模块化代码集合。通过集成软件包,开发者能够快速引入各种预置功能,如网络协议栈、图形界面、文件系统等,无需从零开始编写相关代码,极大地提升了开发效率。
软件包可以大致分为以下几类: - 基础软件包 :提供基础功能,如文件系统、网络通信、设备驱动等。 - 中间件软件包 :提供抽象化的接口和协议,用于简化应用开发,例如HTTP客户端、MQTT协议等。 - 应用软件包 :提供完整的应用程序,可以直接在RT-Thread上运行,比如Web服务器、FTP服务器等。
5.1.2 软件包集成与安装步骤
在RT-Thread中集成软件包,通常需要执行以下步骤:
- 软件包在线集成 :
- 在RT-Thread的Env工具中使用
pkgs --upgrade命令更新软件包列表。 - 使用
pkgs --list命令查看可选软件包列表。 -
使用
pkgs --add <package-name>命令在线添加需要的软件包。 -
软件包手动集成 :
- 下载所需的软件包源码,并解压到RT-Thread源码树的相应目录下。
- 在RT-Thread根目录下执行
scons --menuconfig,在菜单中选择并配置该软件包。 -
编译工程,完成软件包的集成。
-
软件包安装 :
- 在
RT-Thread/bsp目录下,执行pkgs --install <package-name>命令,完成软件包的安装。
示例代码 :
# 更新软件包列表
pkgs --upgrade
# 列出所有可添加的软件包
pkgs --list
# 添加一个软件包,例如:LwIP协议栈
pkgs --add lwip
# 安装一个已添加的软件包
pkgs --install lwip
5.2 调试工具使用与性能优化
5.2.1 常用调试工具的介绍和使用方法
在嵌入式开发中,调试工具是必不可少的,它们帮助开发者定位问题、优化性能。RT-Thread提供了多种调试工具,常用的主要包括:
- RT-Thread Studio :基于Eclipse的集成开发环境,集成了编译、调试、串口打印等功能。
- gdb :开源的跨平台调试工具,支持源码级别的调试。
- rtthread viewer :一个简单的性能查看和日志分析工具。
使用方法 :
- RT-Thread Studio :
- 下载并安装RT-Thread Studio。
- 打开Studio,创建或导入项目。
-
编译项目,并使用Studio内置的调试器进行调试。
-
gdb :
- 在RT-Thread项目根目录下执行
make命令生成可执行文件。 - 使用gdb进行调试:
gdb <your_executable_file>. -
在gdb中使用
run、break、next、step、print等命令进行调试。 -
rtthread viewer :
- 在RT-Thread中集成rtthread viewer软件包。
- 通过串口查看系统运行的实时信息和性能数据。
5.2.2 RT-Thread性能监控和优化策略
性能监控和优化是提升系统运行效率的重要手段。RT-Thread提供了基于内核钩子的性能监控框架,开发者可以利用它来实现性能监控与优化。
性能监控 :
- 使用RT-Thread的内核钩子函数,记录任务切换、中断处理等关键操作的耗时。
- 利用
rt_kprintf在关键代码段打印日志,监控函数调用时间。
性能优化 :
- 任务优化 :合理分配任务优先级,避免高优先级任务的过度占用CPU资源。
- 内存优化 :检查内存泄漏,使用动态内存管理时要确保内存的正确释放。
- 代码优化 :对热点函数进行优化,比如减少函数调用层次,使用更高效的算法。
示例代码 (性能监控钩子函数):
#include <rtthread.h>
/* 性能监控开始 */
static void perf_counter_start(void)
{
rt_enter_kernel();
}
RTM_EXPORT(perf_counter_start);
/* 性能监控结束 */
static void perf_counter_stop(void)
{
rt_exit_kernel();
}
RTM_EXPORT(perf_counter_stop);
/* 性能监控钩子初始化 */
void perf_counter_init(void)
{
/* 注册内核钩子 */
rt_kprintf("Register performance counter hooks.\n");
rt_system_knowledge_add_counter(perf_counter_start, perf_counter_stop);
}
通过上述内容,开发者能够有效地集成和使用RT-Thread软件包,同时掌握调试工具的使用和性能监控的基本方法,进一步提升项目的开发效率和运行性能。在后续的章节中,我们将深入讨论软件包的高级配置和调试工具的高级应用,帮助开发者更好地优化和调试基于RT-Thread的项目。
简介:RT-Thread操作系统以其开源、实时、轻量级的特点,非常适合嵌入式设备应用。本实例将详细说明如何将RT-Thread移植到基于ARM Cortex-M3内核的STM32F103VCT5微控制器上,以增强系统的实时性、可靠性和可扩展性。文章涵盖了从开发环境准备、源码下载与定制、启动代码编写、硬件驱动开发,到软件包的集成与调试工具使用等多个关键步骤。最终通过针对特定开发板的移植指南或代码示例,帮助开发者在STM32F103VCT5上实现和优化RT-Thread操作系统。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 15
15 0
0- 0



 已为社区贡献135条内容
已为社区贡献135条内容

所有评论(0)