探索Matlab/Simulink中双馈风机在风电并网调频控制的奇妙之旅
Matlab/simulink 双馈风机超速减载变桨调频,DFIG调频,一次调频,超速减载,变桨下垂控制,IEEE9节点系统,风电并网,三机九节点系统,对比了转子动能,下垂控制和虚拟惯性控制,超速减载,变桨控制等。 风机的全套控制都有,诚心要的来。 频率特性好。
在风电并网的大领域里,频率稳定可是个关键问题。今天咱就来唠唠在Matlab/Simulink环境下,双馈风机(DFIG)通过超速减载、变桨下垂控制等手段实现一次调频的那些事儿,还会在IEEE9节点(也就是三机九节点系统)中展开探讨。
一、双馈风机调频方法概述
转子动能控制
双馈风机储存的转子动能可用来应对频率变化。当系统频率降低时,风机释放转子动能,增加有功输出,支撑系统频率。简单理解,就像风机自己有个小能量仓库,关键时刻能拿出来应急。
下垂控制
下垂控制模仿传统同步发电机的一次调频特性。频率降低时,按一定比例增加有功功率输出。这种控制方式建立了频率和有功功率之间的关系,代码实现思路大概是这样(Matlab伪代码示例):
% 假设初始频率f0,下垂系数R
f0 = 50;
R = 0.05;
% 实时测量频率f
f = get_real_time_frequency();
% 计算功率参考值P_ref
P_ref = P0 + (f0 - f)/R; 在这小段代码里,P0是初始功率,通过实时获取的频率f与初始频率f0比较,根据下垂系数R来调整功率参考值P_ref,从而实现下垂控制。
虚拟惯性控制
虚拟惯性控制赋予双馈风机类似同步发电机的惯性响应特性。频率变化时,快速调整有功功率输出,抑制频率变化率。
二、超速减载与变桨控制
超速减载
当系统频率降低,双馈风机通过超速减载来增加有功输出。风机加速运行,释放转子动能。实现代码逻辑可能如下:
% 判断频率是否低于阈值
if f < f_threshold
% 计算需要增加的功率
delta_P = calculate_delta_P(f);
% 通过调整风机转速来增加功率
adjust_speed(delta_P);
end这段代码先判断当前频率f是否低于设定阈值fthreshold,如果低于,就计算需要增加的功率deltaP,然后通过调整风机转速来实现功率增加。
变桨下垂控制
变桨控制是调节风机叶片桨距角,改变风能捕获效率。结合下垂控制后,能更精准地调节有功输出。变桨控制代码片段示例(简化版):
% 根据功率误差计算桨距角调整量
beta_adjust = calculate_beta_adjust(P_ref - P_actual);
% 更新桨距角
beta = beta + beta_adjust;
set_pitch_angle(beta); 这里根据功率参考值Pref和实际功率Pactual的误差,计算桨距角调整量beta_adjust,更新桨距角beta并设置到风机上。
三、在IEEE9节点系统中的仿真对比
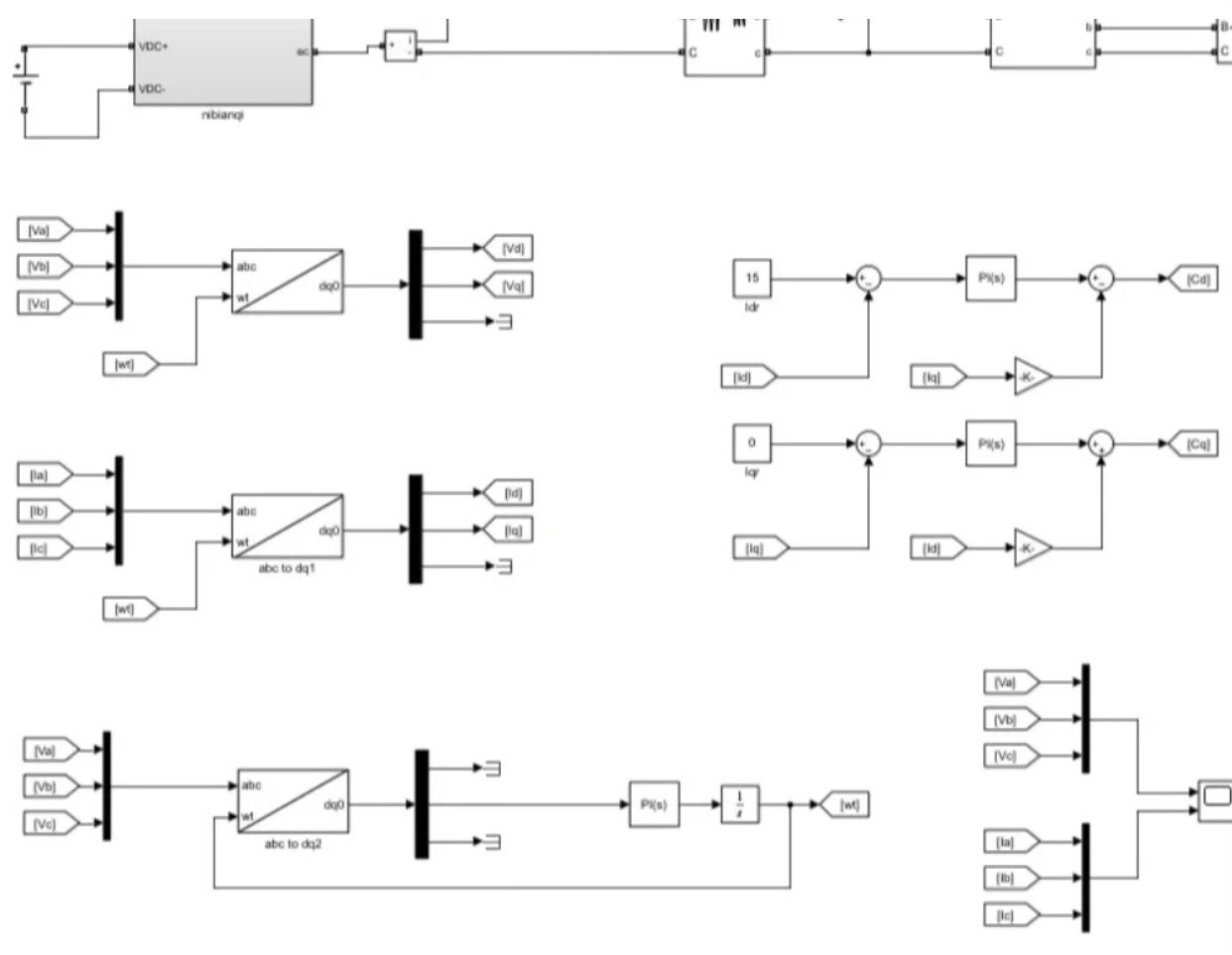
在Matlab/Simulink搭建的IEEE9节点系统模型里,把上述几种控制方式都加进去做仿真。通过对比可以清晰看到,转子动能控制能快速响应频率变化,但持续时间有限;下垂控制能稳定地按比例调整功率;虚拟惯性控制对频率变化率的抑制效果显著。超速减载和变桨控制结合,频率特性表现良好,能有效维持系统频率稳定。
Matlab/simulink 双馈风机超速减载变桨调频,DFIG调频,一次调频,超速减载,变桨下垂控制,IEEE9节点系统,风电并网,三机九节点系统,对比了转子动能,下垂控制和虚拟惯性控制,超速减载,变桨控制等。 风机的全套控制都有,诚心要的来。 频率特性好。
咱这套风机的全套控制方案,频率特性那是杠杠的,能很好地满足风电并网时对频率稳定的要求。要是哪位朋友对这全套控制方案感兴趣,诚心要的来交流呀!希望通过这些探讨,能给大家在风电并网调频控制的研究上带来一些启发。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 6
6 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)