基于 OpenCV 与 C# 的多功能机器视觉工具箱详解
·
基于Opencv C# 开发的圆卡尺、矩形卡尺,直线卡尺、距离测量工具源码,代码运行正常,由实际运行项目中剥离,含测试图片,包含一个强大的视觉控件源码,控件仿halcon,支持平移,无损缩放,显示各种自定义图形工具,鼠标拖动,简单方便。
概述
本文介绍一套基于 OpenCV(通过 OpenCvSharp 封装) 与 C# WinForms 构建的多功能机器视觉工具箱。该工具箱集成了模板匹配、圆/矩形/直线卡尺测量、交点检测、距离测量、相机畸变校正等核心视觉功能,适用于工业自动化、精密测量、图像分析等场景。
基于Opencv C# 开发的圆卡尺、矩形卡尺,直线卡尺、距离测量工具源码,代码运行正常,由实际运行项目中剥离,含测试图片,包含一个强大的视觉控件源码,控件仿halcon,支持平移,无损缩放,显示各种自定义图形工具,鼠标拖动,简单方便。
该系统采用模块化设计,界面友好,功能完整,且具备工程保存/加载能力,便于在实际项目中部署与二次开发。
系统架构与核心模块
整个系统由以下几大核心模块构成:
1. **可视化交互控件(U_DisPlay)**
系统自研了一套高性能图像显示控件 U_DisPlay,支持:
- 图像缩放(Fit/Original/Full)
- 鼠标滚轮缩放与拖拽平移
- 实时像素灰度值提示
- 图形图元(矩形、圆、线段、卡尺等)的绘制与交互
该控件是所有视觉功能的可视化载体,具备良好的扩展性和响应性能。
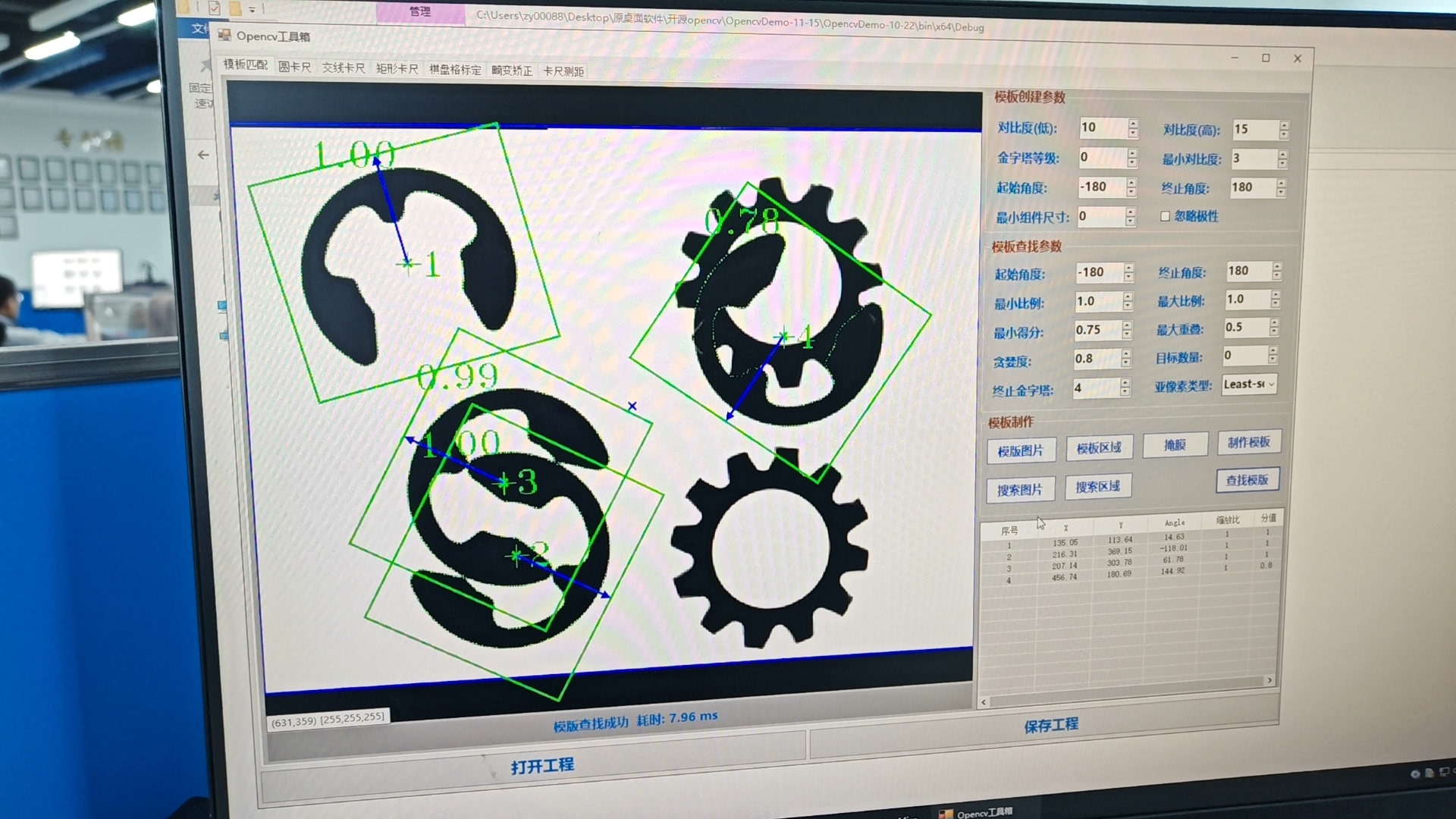
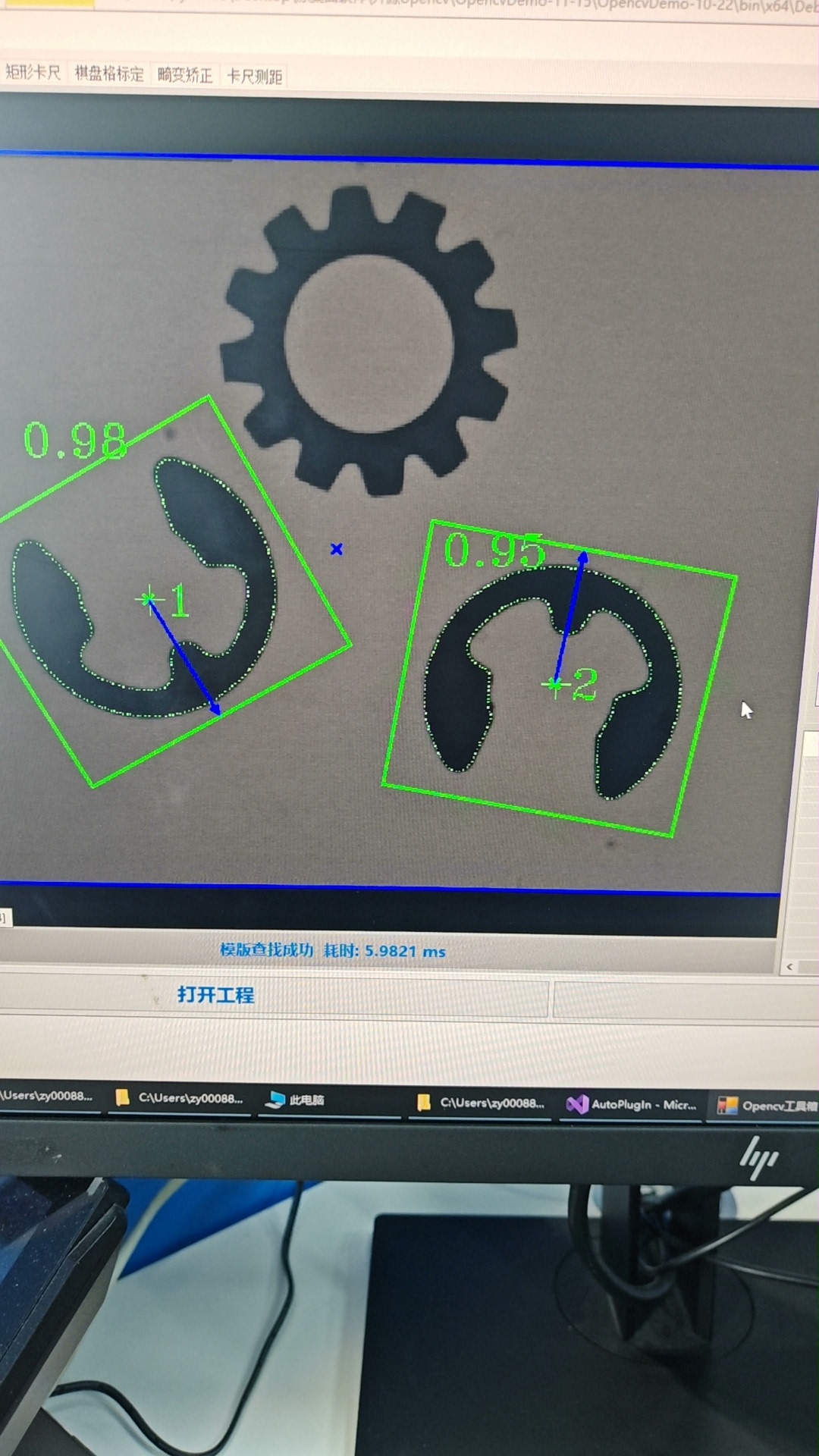
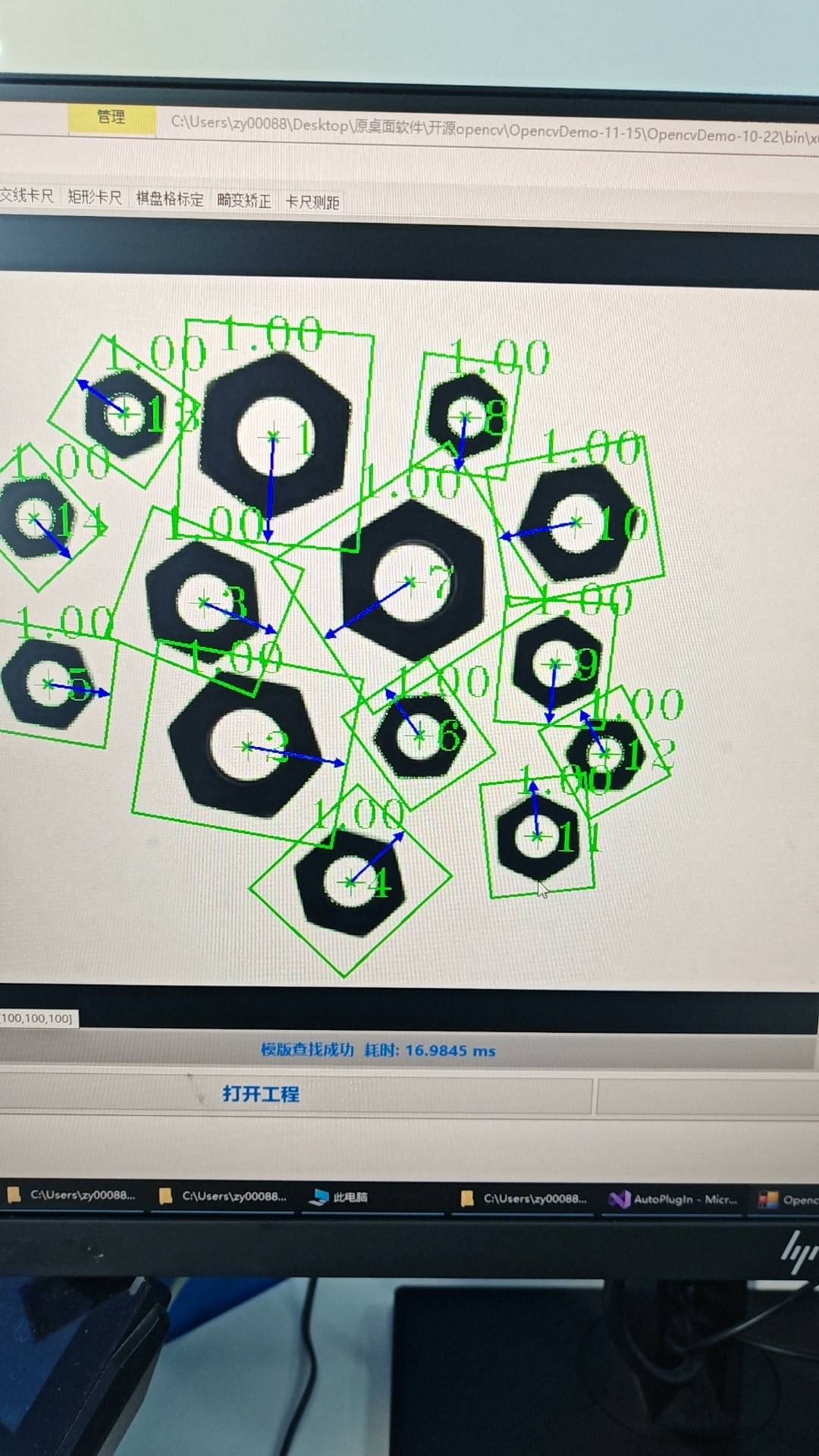
2. **模板匹配模块**
支持基于形状的模板创建与多尺度、多角度匹配,关键特性包括:
- 支持创建带掩膜(Mask)的模板
- 可配置金字塔层级、角度范围、对比度阈值等参数
- 支持亚像素精度匹配与多目标查找
- 匹配结果以列表形式展示(位置、角度、缩放比、得分)
3. **卡尺测量体系**
系统实现了多种卡尺测量工具,基于边缘梯度与一维投影原理进行高精度定位:
圆卡尺(Circle Caliper)
- 围绕指定圆心与半径布设多个径向卡尺
- 支持从内向外/从外向内两种搜索方向
- 可配置边缘极性(明→暗、暗→明、任意)
- 自动拟合圆心与半径,并剔除异常点
矩形卡尺(Rectangle Caliper)
- 在矩形四边上布设卡尺阵列
- 自动计算卡尺数量以适配长短边
- 拟合四条边后求最小外接矩形,输出中心坐标、角度与尺寸
直线卡尺(Line Caliper)与交点检测
- 在两条直线上分别布设卡尺
- 分别拟合两条直线后计算其交点
- 用于定位十字交叉、角点等特征
距离测量卡尺(Distance Caliper)
- 在两点间布设一维卡尺带
- 支持指定起点/终点的边缘搜索次序(如第1个、倒数第2个等)
- 精确计算两点间欧氏距离
4. **相机标定与畸变校正模块**
- 基于棋盘格图像自动检测角点
- 使用 OpenCV 的
calibrateCamera接口计算内参矩阵与畸变系数 - 支持对畸变图像进行
undistort校正 - 参数可保存/加载,便于后续使用
5. **工程管理机制**
- 所有视觉工具的参数、图像、模型均可通过
.prj工程文件统一保存与加载 - 采用二进制序列化 + 图像文件 + XML(相机参数)混合存储策略
- 保证工程数据的完整性与可移植性
功能流程说明
模板匹配流程
- 加载模板图像 → 用户选择 ROI 区域(绿色框)
- (可选)创建掩膜 → 排除干扰区域
- 设置创建参数 → 对比度、金字塔、角度范围等
- 生成模板模型 → 调用底层 DLL 创建形状模型
- 加载搜索图像 → 用户指定搜索区域(蓝色框)
- 设置匹配参数 → 得分阈值、最大重叠、贪婪度等
- 执行匹配 → 返回所有匹配目标的位置与姿态
- 结果可视化 → 在图像上绘制匹配框,并在列表中显示详细数据
卡尺测量通用流程
- 加载待测图像
- 添加卡尺图元 → 用户交互绘制初始位置(如圆心半径、直线端点等)
- 配置卡尺参数 → 数量、长度、宽度、阈值、方向、极性等
- 执行边缘搜索 → 对每个卡尺进行一维投影与边缘检测
- 拟合几何模型 → 使用 RANSAC 或最小二乘法剔除异常点并拟合
- 输出结果 → 显示中心/交点坐标、角度、距离等,并在图像上绘制结果图形
相机标定流程
- 准备多张棋盘格图像
- 设置棋盘格参数 → 内部角点行列数、物理尺寸等
- 自动检测角点 → 调用
findChessboardCorners并亚像素优化 - 计算相机参数 → 调用
calibrateCamera得到内参与畸变系数 - 校正验证 → 对原始图像进行去畸变,并保存结果
技术亮点
- 高性能图像控件:自研
U_DisPlay控件支持流畅缩放与图形交互,媲美商业视觉软件。 - 灵活的卡尺系统:统一的卡尺抽象模型,支持多种几何形状的高精度边缘定位。
- 工程化设计:完整的参数保存/加载机制,便于产线部署与调试复现。
- 工业级鲁棒性:集成异常点剔除、多模型拟合策略,适应复杂工业场景。
- 模块解耦清晰:各功能模块独立封装,便于扩展新工具(如椭圆卡尺、Blob分析等)。
应用场景
- PCB 缺陷检测:模板匹配定位元件,卡尺测量焊点间距
- 机械零件尺寸测量:圆卡尺测孔径,矩形卡尺测外框
- 装配定位引导:交点卡尺定位装配基准点
- 相机在线标定:定期校正镜头畸变,保证测量精度
- 教学与算法验证:直观展示视觉算法中间过程与结果
总结
该视觉工具箱是一套功能完备、结构清晰、具备工业实用价值的开源解决方案。它不仅提供了丰富的视觉测量工具,还通过良好的工程架构为后续功能扩展奠定了坚实基础。对于希望快速构建机器视觉应用的开发者而言,是一个极具参考价值的项目范例。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 9
9 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)