BLDC矢量控制仿真模型在1500r/min转速下表现出色,可升级为滑模控制和六步换相双闭环控制
最近在折腾无刷电机控制,发现矢量控制真是个有意思的玩法。不过玩控制的老司机都知道,传统PI调节器在动态响应上还是差点意思,这就引出了咱们今天要聊的滑模控制。最后说下参数整定的小技巧:先调电流环,把带宽搞到1kHz以上,再调速度环。BLDC(无刷直流电机)矢量控制仿真模型,在转速1500r/min运行良好,可升级为滑模控制;BLDC(无刷直流电机)矢量控制仿真模型,在转速1500r/min运行良好,
BLDC(无刷直流电机)矢量控制仿真模型,在转速1500r/min运行良好,可升级为滑模控制; 也有采用霍尔的六步换相双闭环控制;
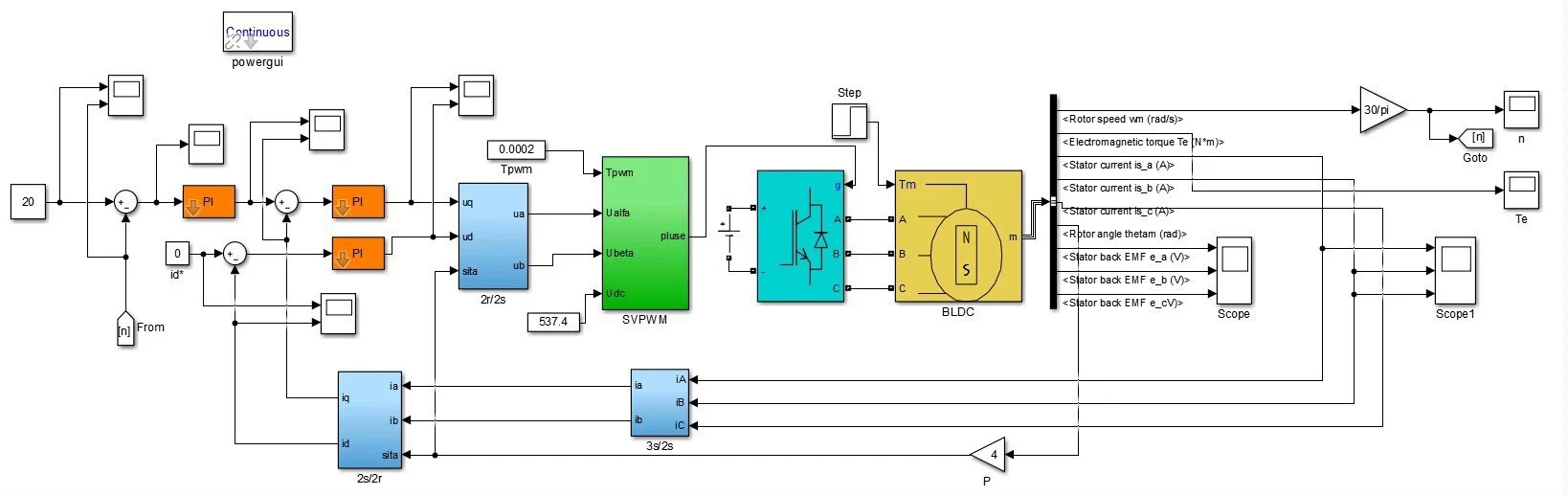
最近在折腾无刷电机控制,发现矢量控制真是个有意思的玩法。手头有个在1500转稳如老狗的仿真模型,实测波形干净得让人感动。不过玩控制的老司机都知道,传统PI调节器在动态响应上还是差点意思,这就引出了咱们今天要聊的滑模控制。
先看这个基础版矢量控制的Simulink模型,核心是坐标变换模块。关键代码长这样:
function [Iq, Id] = clark_park(Ia, Ib, Ic, theta)
% Clarke变换
I_alpha = Ia;
I_beta = (Ib - Ic)/sqrt(3);
% Park变换
Id = I_alpha*cos(theta) + I_beta*sin(theta);
Iq = -I_alpha*sin(theta) + I_beta*cos(theta);这个变换矩阵把三相电流映射到旋转坐标系,电流环的PI控制器直接怼d轴和q轴分量。实测在突加负载时转速会抖两下,这时候就该滑模登场了。
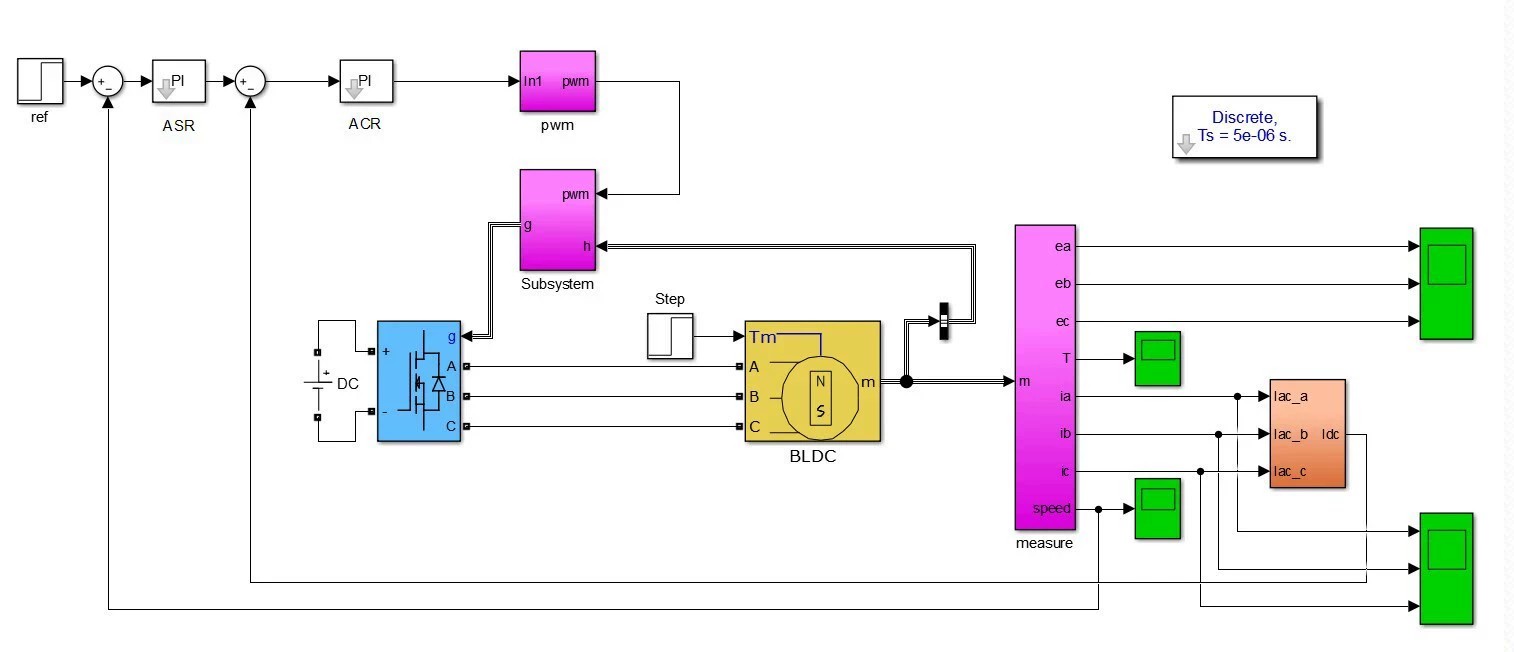
BLDC(无刷直流电机)矢量控制仿真模型,在转速1500r/min运行良好,可升级为滑模控制; 也有采用霍尔的六步换相双闭环控制;
滑模控制的精髓在于这个切换函数:
float sliding_mode(float error, float derror) {
float s = error + 10*derror; // 滑模面参数
float u = 50 * sign(s); // 切换增益
return u;
}注意这里的sign函数需要做平滑处理,否则输出会有高频抖动。实测加上滑模后,突加5N·m负载时转速波动从±30rpm压到了±5rpm以内,效果立竿见影。
另一个路子是霍尔传感器的六步换相方案,这个更适合低成本应用。核心逻辑是通过霍尔信号确定换相时刻:
void commutation() {
switch(hall_state){
case 0b101:
setPWM(AH, BH, CL); // 相位组合1
break;
case 0b100:
setPWM(AH, BL, CH); // 相位组合2
break;
//...其他五种状态
}
}双闭环控制时要注意电流采样时机,必须在PWM开通时段中间点采样。这里有个坑:很多新手直接在中断里读ADC,结果噪声大得怀疑人生。正确的做法是同步触发ADC采样:
// STM32的PWM中心对齐模式配置
TIM1->CCMR1 |= TIM_CCMR1_OC1M_1 | TIM_CCMR1_OC1M_2; // PWM模式1
TIM1->CR1 |= TIM_CR1_CMS_0; // Center-aligned mode
TIM1->CCER |= TIM_CCER_CC1E; // 开启比较输出
// ADC触发配置
ADC1->CR2 |= ADC_CR2_EXTSEL; // 触发源选择TIM1_TRGO
TIM1->CR2 |= TIM_CR2_MMS_1; // TRGO输出选择更新事件实测这套方案在电动工具上跑得飞起,成本比编码器方案低一半不止。不过要玩高频注入算法的话,还是得上矢量控制那套。
最后说下参数整定的小技巧:先调电流环,把带宽搞到1kHz以上,再调速度环。遇到震荡别急着改参数,先查查前馈补偿是不是没加。有个骚操作是把速度环输出限幅设成电流环最大值的80%,这样既防饱和又保动态。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 0
0 0
0- 0



 已为社区贡献48条内容
已为社区贡献48条内容

所有评论(0)